- lietuvių
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Kintamųjų dažnių keitiklių darbo principai, valdymo metodai ir taikymai
Katalogas
Kintamųjų dažnių keitiklio (VFD) apžvalga
Kintamųjų dažnių keitiklis (VFD) yra energijos elektronikos valdiklis, kuris reguliuoja AC variklio greitį ir sukimo momentą, keisdamas statoriaus elektrinį dažnį ir koordinuodamas išėjimo įtampą bei srovę, kad variklio magnetinis srautas ir sukimo momentą generuojanti srovė liktų tinkamame darbo diapazone. Gamykloje jis dažniausiai pasireiškia ne kaip paprastas „greičio nustatytojas“, o kaip disciplinuotas sukimo momento ir srovės reguliatorius, kuris atsitiktinai generuoja norimą greitį, kai elektriniai poveikiai variklio terminaluose yra kontroliuojami.
Daugeliui AC variklių elektrinis dažnis didžiąja dalimi lemia besisukančio magnetinio lauko greitį ir variklio greitį, o indukcinio variklio slydimas sukuria nedidelį skirtumą tarp jų. Keisdama dažnį, keitiklis reguliuoja įtampą, kad išlaikytų tinkamą magnetinį srautą. Per mažai srauto gali sumažinti sukimo momentą ir reakciją, o per daug srauto gali padidinti srovę, šilumą ir triukšmą.
Daugelis šiuolaikinių keitiklių taip pat tiesiogiai valdo variklio srovę, kad išlaikytų stabilų sukimo momentą mažais greičiais, staiga pasikeitus apkrovai, arba kai variklio charakteristikos keičiasi dėl temperatūros svyravimų.
Gradientuojant ir sprendžiant problemas, dažnai atrodo, kad dažnio valdymas turėtų paaiškinti viską, kol pirmas greitas pagreitėjimas, staigus stabdymas ar apkrovos smūgis neatskleidžia trūkumų. Kasdienis našumo skirtumas tarp keitiklių dažnai pasireiškia srovės matavimo kokybe, srovės kilpos derinimu ir tuo, kaip sklandžiai keitiklis valdo tranzitus, o ne pačiame pagrindiniame dažnio komandoje.
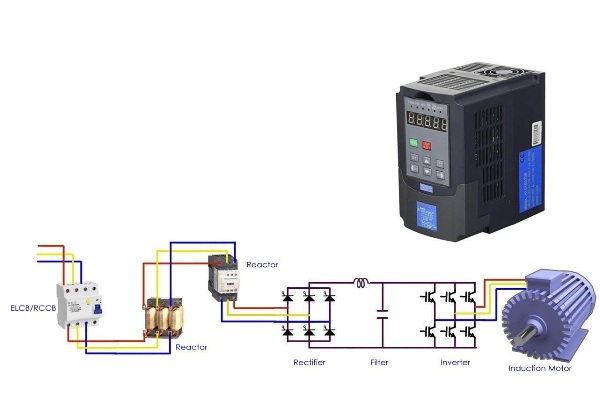
Dauguma pramoninių VFD naudoja AC–DC–AC struktūrą, nes ji dažniausiai yra tvirta, ekonomiška ir tinkama įvairiems variklių tipams ir darbo profiliams.
Priekinis lygintojas paverčia atvykstantį AC į DC. Dažniausiai trijų fazių tiekime naudojama 6 diodų tiltų schema. Apytikslė be apkrovos DC magistralės lygis yra:
VDC ≈ 1.414 × VLL
Pavyzdžiai, dažnai matomi lauko matavimuose:
• 380 VAC trijų fazių → ~537 VDC
• 220 VAC vienfazis → ~311 VDC
Diodų tiltas yra paprastas ir patikimas, bet jis ima nesinusoido srovę iš energijos linijos, kas gali sukurti harmonikas ir padidinti stresą silpnose energetikos sistemose. Kai kuriose instalacijose problemos, tokios kaip nereikalingi išjungimai, transformatorių įkaistymas ar nestabilus veikimas gali būti sukeltos sąveikos tarp harmoninių srovių ir linijos impedanso, o ne paties variklio.
Dažnai naudojamos mitigacijos galimybės pramoniniuose skydeliuose:
• Linijos reaktoriai (AC choke)
• DC jungties choke
• EMI/RFI filtrai
Kartais renkami rektifikatoriai dėl specifinio elgesio:
• SCR (thyristor) lygintuvai ribotam valdomam įkrovimui (dabar mažiau bendro naudojimo naujuose statiniuose)
• Aktyvūs priekiniai galai (AFE), naudojantys IGBT, kad pagerintų galios faktorių, sumažintų harmonikas ir leistų regeneraciją atgal į tinklą
Praktinis būdas įrėminti lygintuvo sprendimą yra tas, kad jis apibrėžia, kaip pavaros sąveikauja su elektros tinklu. Nustebinantis skaičius problemų, iš pradžių priskirtų varikliams, galiausiai pasirodo, kad susijusios su įėjimo pusės suderinamumu ir linijos sąlygomis.
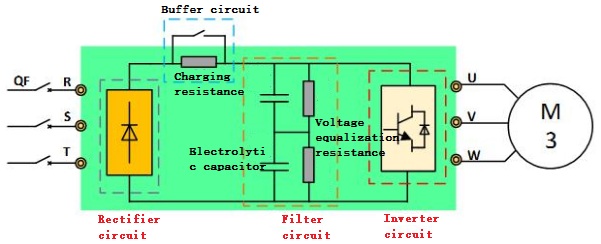
Įjungimo metu DC jungtinių kondensatorių pradžioje atrodoma, kad jie yra arti trumpojo jungimo. Be srauto kontrolės, lygintuvas ir aukščiau esantis apsaugos ilgis gali pamatyti staigų srovės šuolį, kuris jaučiasi kaip kietas smūgis sistemai. Dauguma pavarų tai išsprendžia išankstinio įkrovimo keliu, kuris riboja srovę, kol magistralė įkraunama, tada pereinama prie normalaus veikimo.
Tipiniai išankstinio įkrovimo elementai:
• Serijinis rezistorius DC magistralėje paleidimo metu
• Apsauginis kontaktorius arba relė, kuri užsidaro po to, kai kondensatoriaus įtampa pakyla
Realiuose įrenginiuose išankstinio įkrovimo gedimai dažnai pasirodo kaip periodiški paleidimo gedimai, įkrovimo laiko pasibaigimo signalai arba kontaktorių griaustiniai. Dažnos priežastys yra senstantys išankstinio įkrovimo rezistoriai, dėvėti apeinantys kontaktai ir žema įtampa paleidimo metu, trukdanti pavarai teisingai užbaigti įkrovimo procesą.
DC jungtis sumažina lygintuvo bangavimą ir suteikia trumpalaikį energijos kaupimą, kai apkrova keičiasi greičiau nei šaltinis gali reaguoti. Paprastai jame yra keli elementai, kiekvienas iš jų atlieka skirtingą vaidmenį, o ne vienas "vienas komponentas išsprendžia viską" sprendimas.
Tipiniai DC jungties komponentai:
• Elektrolytinių kondensatorių
• Nuleidimo ir (arba) balansavimo rezistorių
• Kartais filmų kondensatorių, siekiant slopinti aukšto dažnio bangavimą
Didesnėms magistralėms kondensatoriai gali būti prijungti serijomis. Kadangi tikri kondensatoriai nesidalina įtampa tobulai, pridedami balansavimo rezistoriai, kad sumažintų netolygų įtampos pasiskirstymą, kuris pagreitina senėjimą ir gali priversti vieną kondensatorių patirti ankstyvą gedimo režimą. Serviso darbuose pavaros gali tęsti darbą su sumažinta talpa, kas gali būti apgaulingai ramus; tada ji pradeda reakciją ryškiau į linijos kritimus, regeneracijos įvykius arba greitus apkrovos žingsnius. Tas "tolerancijos" pokytis dažnai yra pirmasis užuomina, kad DC jungties sveikata slysta.
Daugelyje vietų DC jungties kondensatorių rinkinys pasiekia tarnavimo pabaigą anksčiau nei IGBT, ne dėl prasto dizaino, o dėl to, kad šiluma ir bangavimosi srove esanti įtampa tyliai kaupiasi laikui bėgant. Štai kodėl oro srauto valdymas, sumažinimas aukštoje aplinkos temperatūroje ir vidutiniai nešiklio dažnių pasirinkimai dažnai atsiperka mažiau nei paaiškinamų atjungimų ir mažiau vidutinio amžiaus pavarų rekonstrukcijų.
Inverterio tiltas sintezuoja valdomą trifazį išėjimą iš DC magistralės, dažniausiai naudojant IGBT, valdomus PWM. Anti-paraleliniai diodai, esantys per IGBT, suteikia srovės kelią per perjungimo perėjimus ir palaiko srovės tęstinumą, kai variklio induktyvumas "suvokia" laikyti srovę.
PWM leidžia tvirtą valdymą, tačiau taip pat generuoja greitas įtampos kraštines (aukštas dV/dt). Padidinus perjungimo (nešiklio) dažnį, dažnai sumažėja girdimas triukšmas ir srovės bangavimas, tačiau padidėja perjungimo nuostoliai ir vidinė šiluma. Praktikoje nustatymai apima kompromisus, kuriuos operatoriai gali pajusti iš karto: tylumas variklio pusėje prieš temperatūros rezervą pavaros viduje.
Dažni veikimo kompromisai:
• Mažas nešiklio dažnis: vėsesnė pavara, didesnis variklio akustinis triukšmas ir sukimosi bangavimas
• Didesnis nešiklio dažnis: tylesnis variklis, karštesnė pavara, didesnė streso dėjimui laiko atžvilgiu
Kabelio ilgis ir variklio amžius gali stumti išėjimo reikalavimus link, kuris nustebina žmones, kurie tik žiūri į nominalią arklio galią. Ilgi laidai ir senesnės izoliacijos sistemos gali prireikti papildomų priemonių.
Dažni išėjimo pusės priedai ir praktikos:
• dV/dt filtrai arba sinusiniai filtrai
• Tinkamas žemės derinimas ir ekranuotų kabelių praktika, kad sumažintų guolių srovės ir EMI problemas
Kai variklis lėtėja arba apkrova stumia variklį (perdavimo sąlyga), mašina gali generuoti energiją atgal į DC magistralę. Magistralės įtampa kyla, o pavara turi nukreipti arba išsklaidyti tą energiją, kad išvengtų DC per didelės įtampos atjungimo. Tai yra viena iš tų elgsenų, kuri gali atrodyti atsitiktinė, kol energijos srautas bus aiškiai matomas: inercija ir greičio profilio pasirinkimai dažnai dominuoja rezultatą.
Dažnos metodai, naudojami regeneratyviai energijai valdyti:
• Dinaminis stabdymas (stabdžių pjaustytuvas + rezistorius): konvertuoja regeneracinę energiją į šilumą; plačiai naudojamas, nes elgsena yra prognozuojama, o įranga yra paprasta
• Regeneratyvus priekinis galas (AFE arba atskiras regeneracijos vienetas): grąžina energiją į tinklą; dažnai pasirenkamas, kai stabdymas yra dažnas arba kai energijos atgavimo tikslai atitinka veiklos tikslus
• Ilgesni lėtėjimo rampos: sumažina pikinius regeneratyvios energijos srautus; kartais pakanka išvengti papildomų stabdymo įrenginių
Probleminėje sprendimo srityje DC viršįtampiai dažnai sustoja, kai dekadavimo laikas yra atlaisvinamas arba stabdymo aparatai yra pritaikyti atitikties realiam inertiškam. Tai, kas dažnai ignoruojama, yra kaip agresyviai greičio profilis konfigūruojamas atsižvelgiant į mechaninę energiją, saugomą apkrovoje.
VFD valdymas svyruoja nuo paprastų skalinių metodų iki greitų srovės reguliavimo metodų. Mašinos „jausmas“, ypač esant žemam greičiui ar keičiant apkrovas, labai priklauso nuo to, kuri kontrolės šeima naudojama ir kaip gerai variklio modelis atitinka realybę.
V/Hz palaiko apytikslę pastovią įtampos ir dažnio santykį. Tai dažnai yra patogus sprendimas ventiliatoriams ir siurbliams, kurias sukimo momento paklausa yra pakankamai numatoma, o dinamikos yra kuklios. Kur jis paprastai rodo savo ribas, yra žemo greičio sukimo momento standumas ir atsakas staigių apkrovų pokyčių metu, kur sistema gali atrodyti šiek tiek neaiški arba sulėtinta.
Vektorinė kontrolė (FOC) ir DTC naudoja srovės/įtampos jutiklius ir greitą skaičiavimą (CPU/DSP), kad reguliuotų srauto generuojančių ir sukimo momento generuojančių srovės komponentų. Rezultatas yra labiau užtikrintas sukimo momento atsakas, ypač arti nulio greičio ir greitų perėjimų metu, o greičio reguliavimas dar labiau pagerėja naudojant koduotojo atsiliepimus.
Dažni našumo rezultatai, susiję su šiais metodais:
• Stipresnis žemo greičio sukimo momento elgesys
• Greitesnė reakcija į apkrovų pokyčius
• Tikslesnis greičio reguliavimas, ypač naudojant koduotojo atsiliepimus
Daugelyje įrenginių automatinis derinimo procesas padeda pagerinti našumą, derinant valdymo modelį su realiais variklio elektros charakteristikais, o ne remiantis numatytais parametrų vertėmis. Tai dažnai lemia tikslesnį ir stabilesnį variklio valdymą.
VFD keičia ne tik RPM. Tai veikia variklio šilumos elgseną, mechaninio apkrovimo modelius ir ankstesnę energijos kokybę, o šie šalutiniai poveikiai linkę pasireikšti po to, kai kintamojo greičio naujuma praeina.
Dažnai ignoruojami sistemos lygio poveikiai:
• Variklio aušinimas esant žemam greičiui: ašinio ventiliatoriai transportuoja mažiau oro; nuolatinius sukimo momento žemo greičio reikalavimai gali reikalauti atskirai maitinamo pučiaus ar inverterio reitingo variklio
• Mechaninės įtampos modeliai: sklandesnis pagreitinimas gali sumažinti smūgio apkrovas, tuo tarpu agresyvūs sukimo momento apribojimai gali prisidėti prie diržo slydimo, sujungimo įtampos ar rezginio
• Energijos kokybė: diodų įvesties pjūvis sukuria harmonikas; keli varikliai bendrame šaltinyje gali reikalauti koordinuotos mažinimo
• Apsauga ir saugumas: integruota klaidų aptikimo (perdavimo, virš / žemų voltų, per didelės temperatūros, žemės gedimo) ir funkcijos, pvz., Safe Torque Off (STO), keičia, kaip sistemos yra sujungtos, patvirtinamos ir prižiūrimos
Stabilių rezultatų retai pasiekiama, paliekant viską numatyta ir tikintis, kad procesas bus švelnus. Numatomumas paprastai kyla iš trumpo, metodiško nustatymo ritmo, kuris yra mažiau dramatiškas nei didvyriško sprendimo, tačiau daug patikimesnis, kai mašina veikia švariai pamaina po pamainos.
Nustatymo kontrolinis sąrašas, kuris dažnai atsiperka naudojant:
• Įveskite tikslius variklio plokštelės duomenis (įtampa, srovė, dažnis, greitis ir galios koeficientas, jei variklis tai prašo)
• Pasirinkite kontrolės režimą, kuris atitinka apkrovos profilį (ventiliatorius/siurblys, nuolatinis sukimo momentas arba didelė dinamika)
• Nustatykite pagreitinimą / sulėtėjimą atsižvelgdami į inerciją ir stabdymo galimybes, o ne asmeninį pasirinkimą
• Pasirinkite nešiklio dažnį, kuris atspindi tiek triukšmo lūkesčius, tiek šilumos rezervą
• Patvirtinkite žemės, kabelio tipo ir kabelio ilgio praktikas prieš persekiojant atsitiktines ar „fantomines“ klaidas
Produktyvus proto modelis yra traktuoti VFD kaip energijos paskirstymo sistemą su trimis skirtingais įpareigojimais: formuojant įeinančią energiją linijos pusėje, buferuojant energiją DC jungtyje ir reguliuojant variklio srovę išvesties pusėje. Kai tas srautas laikomas matomame, kartotiniai problemos, DC viršįtampų išjungimai, silpnas žemo greičio sukimo momentas, trukdžių klaidos ir ankstyvas komponentų senėjimas, linkę tampa lengviau paaiškinti, išbandyti ir ištaisyti.
Klasifikacija VFD
Pagal galios etapo architektūrą
VSI varikliai plačiai naudojami pramoninėse sistemose, nes topologija yra paprasta ir praktiška. Variklis paverčia AC įeinančią energiją į DC jungtį per diodų tiltelį arba aktyvų priekį, tada naudoja inverterį, kad generuotų kintamosios dažnio ir kintamosios įtampos energiją varikliui. Dideli DC jungties kondensatoriai padeda palaikyti stabilų įtampos tiekimą ir sumažinti įtampos svyravimą dėl apkrovų pokyčių.
Kasdieniniame paleidimo darbe ši architektūra dažnai yra atlaidžiai reaguojanti į bendrus kintamo sukimo momento apkrovas, tokius kaip siurbliai ir ventiliatoriai, todėl ji dažnai palieka gerą pirmą įspūdį lauke.
Tuo pačiu metu standžios jungties ir greito perjungimo kraštų derinys gali padidinti dv/dt variklio terminaluose, o ta realybė tampa sunkiai ignoruojama, kai variklio kabeliai tampa ilgi arba kai senesnės izoliacijos sistemos jau gyvena pasiskolintą laiką.
Įprasti užsakymo detalės, kurios reguliariai lemia, ar VSI įrengimas atrodo švarus ar chaotiškas:
• Variklio kabelio ilgis ir maršrutas
• Žemės metodas ir sujungimo kokybė
• dv/dt arba sinusinės filtravimo strategija
CSI varikliai užima kitokią poziciją: didelis induktorius DC lygyje stumia sistemą link santykinai nuolatinės DC srovės, o išėjimo etapas formuoja variklio srovę atitinkamai. Jie šiandien rečiau užsakomi, tačiau vis tiek pasirodo didelės galios, vidutinės įtampos ir sunkiųjų darbų aplinkose, kur kontroliuojamo srovės elgesys atitinka gamyklos rizikos profilį ir veiklos kultūrą.
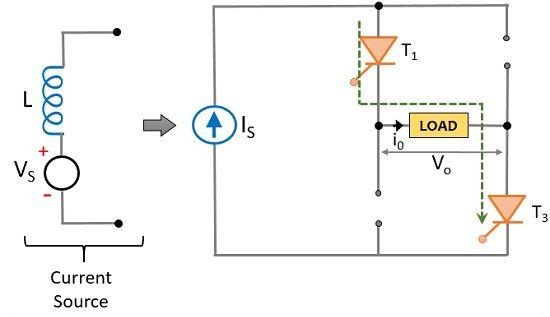
Praktikoje, CSI linkęs mainyti patogumą į prognozuojamumą. Įrangos pėdsakas yra didesnis, konfigūracijos erdvė gali atrodyti siauresnė, o lengvai prieinamų dalių ir technikų ekosistema yra mažesnė nei to tikisi dauguma grupių, dirbančių su VSI. Vis dėlto, taikymams, kurie atitinka CSI stiprybes, stabili srovės elgsena gali būti užtikrinanti, ypač kai vieta vertina konservatyvų elektrinį stresą ir patvarų veikimą virš kompaktiškumo.
Įprasti CSI kompromisai, formuojantys tikrus projektus:
• Didelis fizinis dydis ir didesnis sistemos sudėtingumas
• Mažiau pagrindinių paslaugų galimybių ir atsarginių dalių
• Stiprus atitikimas tam tikroms MV ir sunkiųjų darbų naudojimo atvejams
Diskusijos apie variklius dažnai sutelkiamos į keitiklį, tačiau priekis dažnai nusprendžia, kaip sistema elgiasi gamyklos autobuse ir stabdymo metu. Diode priekis yra paprastas ir biudžetui draugiškas, tačiau jis traukia nesinusoidinę įvesties srovę ir paprastai negali grąžinti energijos tinklui. AFE gali pagerinti įvesties galios koeficientą, sumažinti harmonikas ir palaikyti regeneraciją.
Šis skirtumas tampa skausmingai akivaizdus procesuose, kuriuose dažnai būna sulėtėjimas ar perkrovos. Kai mašina nuolat trikdo dėl DC autobuso per didelės įtampos per greitus sustojimus, vilioja kaltinti derinimą, tačiau nemalonus faktas dažnai yra energijos tvarkymo neatitikimas: energija grįžta greičiau, nei sistema gali ją sugerti ar grąžinti.
Priekinių ir energijos tvarkymo variantai, dažnai pasirenkami lauke:
• Diode priekis
• Aktyvus priekis
• Stabdymo rezistorius / dinaminis stabdymo jungiklis
• Regeneracinis įrenginys arba bendri DC autobuso sprendimai
• Ilgesnis sulėtėjimo rampos laikotarpis, atitinkantis proceso toleranciją
Klasifikacija pagal perjungimo ir modulacijos metodą
Senesni varikliai kartais remiasi PAM ar ankstesnėmis modulacijos strategijomis, susijusiomis su senais energijos prietaisais ir valdymo įranga. Šios sistemos vis dar pasirodo ilgai tarnaujančioje įrangoje, ir jos gali veikti patikimai, tik iki to momento, kai gyvavimo ciklo parama pradeda jaustis kaip spėlionė. Palyginti su moderniais PWM būdais, jie paprastai atsilieka efektyvumu, akustiniu elgesiu ir valdymo galimybėmis.
Iš priežiūros perspektyvos emocinis "slėgio taškas" retai būna našumas, tai yra nežinomybė. Kai atsarginių komponentų tampa trūkumu ir dokumentacija yra menka, modernizacijos planavimas paprastai koncentruojasi į migraciją prie šiuolaikinių PWM variklių, tuo pačiu gerbiant esamus variklius, kabelius ir proceso apribojimus.
PWM yra modernus standartas, nes siūlo lanksčią įtampos ir dažnio kontrolę ir palaiko kontrolės režimus, kurių dauguma grupių tikisi šiandien. Erdvės vektoriaus PWM yra plačiai naudojamas, nes jis pagerina DC autobuso naudojimą ir gali sumažinti harmoninį iškraipymą variklio srovėje.
Viena operatyvinė detalė, kurią patyrę technikai išmoksta vertinti su nuolankumu, yra ta, kad PWM bangos formos kokybė visada turi savo kainą. Švaresnė srovė paprastai reikalauja daugiau perjungimo veiklos, o tai didina perjungimo nuostolius ir šiluminę apkrovą. Geriausi rezultatai paprastai gaunami subalansuojant nešiklio dažnį, šiluminį laisvumą ir girdimą triukšmo tikslus, o ne siekiant vieno geriausio rankenos nustatymo.
Įprasti PWM konfigūracijos svertai, kurie reguliariai mainomi tarpusavyje:
• Nešiklio dažnis
• Šiluminis marga ir radiatoriaus/ventiliatoriaus galimybė
• Girdimo triukšmo lūkesčiai
• Variklio srovės svyravimai ir sukimo momento svyravimų tolerancija
Padidinus nešiklio dažnį, dažniausiai sumažėja srovės svyravimai ir tai gali perkelti perjungimo triukšmą virš jautriausio girdimo diapazono. Užimtose erdvėse ši kaita gali jaustis kaip palengvėjimas, o tam tikruose įrenginiuose tai tiesiogiai pagerina suvokiamą produkto kokybę.
Apribojimas yra šilumos valdymas. Didelis perjungimo dažnis didina keitiklio nuostolius, ir tai gali stumti variklį link deratingo, stipresnio korpuso oro srauto arba didesnio rėmino dydžio. Daugelis lauko skundų, kurie pasirodo kaip „paslaptingas perkaitimas“, tampa daug mažiau paslaptingi, kai kartu įvertinami nešiklio dažnis, aplinkos temperatūra, korpuso apribojimai ir darbo ciklas.
Dažnai naudojami šilumos valdymo sprendimai, siekiant stabilizuoti didelio nešiklio nustatymus:
• Sumažinti nešiklio dažnį iki realistiško lygio darbo ciklui
• Sumažinti išėjimo srovę ir peržiūrėti perkrovos lūkesčius
• Pagerinti uždangos vėdinimą arba šilumos šalinimo kelią
• Pereiti prie didesnio disko rėmo dydžio
Vidutinės įtampos VFD dažnai naudoja daugiaaukštes inverterių topologijas, kad sumažintų įtampos šuolius ir pagerintų bangos formas. Plati juostos prietaisai, tokie kaip SiC ir GaN, gali perjungti greičiau ir efektyviau, kas gali pasijusti kaip techninė pergalė, kol greiti kraštai nepadidina dv/dt streso ir elektromagnetinio trikdžio schemose, kurios nebuvo vykdomos disciplinuotai.
Pragmatiškas būdas apie tai galvoti yra tas, kad greitesnis perjungimas gali pagerinti valdomumą, tuo pačiu padidindamas montavimo detalių matomumą. Kai variklio guoliai rodo ankstyvą nusidėvėjimą arba kai jutikliai pradeda triukšmauti, dažnai priežastis yra bendrosios įtampos ir laidininkų/grindų praktika, o ne kokie nors trūkumai kontrolės algoritme.
Montavimo ir mitigavimo elementai, kurie dažnai lemia rezultatus su greitais kraštais:
• Variklio kabelio pasirinkimas ir ekrano metodas
• Žemės ir jungimo topologija
• Išėjimo dv/dt filtrai arba sinusiniai filtrai
• Guolio srovės mažinimas
• EMI sąmoningas išdėstymas ir signalų/galingumo laidų atskyrimas
Klasifikacija pagal valdymo filosofiją
V/Hz valdymas išlaiko įtampos ir dažnio santykį, kuris išlaiko variklio magnetinį srautą darbinėje zonoje. Tai paprasta, stabili daugelyje montavimų ir plačiai naudojama kintamos sukimosi momentui, tokiems kaip ventiliatoriai ir centrifugalai siurbliai.
Ši metodika dažnai puikiai veikia, kai procesas neprašo griežto sukimosi momento valdymo labai mažame greityje. Praktikoje ji dažnai sekasi, nes sumažina derinimo pastangas ir sumažina osciliacijų, sukeltų neteisingų variklio parametrų, tikimybę. Kompromisas yra kuklus dinaminis atsakas, ypač greitai kintant apkrovai, kur procesas reikalauja, o sistema reaguoja su vėlavimu.
Vektoriaus valdymas atskiria sukimosi momento ir magnetinio srauto komponentus, vertindamas arba matuodamas variklio būsenas. Be jutiklių vektoriaus valdymas gali veikti įspūdingai net be koduotojo, tačiau jis labai priklauso nuo tikslių variklio duomenų ir pakankamai stabilios darbo sąlygų. Uždarų ciklų vektoriaus valdymas prideda koduotąjį arba rezoliuotą, paprastai gerindamas žemo greičio sukimosi momento elgesį, tikslumą ir pereinamąjį atsaką.
Praktikoje daugelis vektoriaus valdymo problemų kyla iš parametrų, o ne teorijos. Serijinės etiketės įrašai dažnai yra pradiniame taške, o ne finišo linijoje. Trumpas identifikavimo važiavimas, racionalūs bazinės dažnio pasirinkimai ir realūs srovės limitai dažnai paverčia drive, kuris jaučiasi minkštas, į tokią, kuri laiko greitį ir sukimosi momentą taip, kaip operatyvai gali pasitikėti.
Vektoriaus valdymo nustatymo elementai, kurie dažnai lemia našumą:
• Patvirtinti variklio serijiniai duomenys
• Variklio ID / automatinio derinimo rezultatų tikrumas
• Bazinio dažnio pasirinkimas, atitinkantis variklio dizainą
• Srovės ribos ir sukimosi momento ribos, suderintos su mechanika
DTC reguliuoja sukimosi momentą ir srautą tiesiogiai, leidžiant labai greitai reaguoti sukimosi momentui taikymuose su staigiais perėjimais ir reikalaujančiu sukimosi momento elgesiu.
Sprendimo taškas retai būna tik atsako greitis; tai, kaip mechaninė sistema toleruoja tą atsaką. Drive, kuris gali beveik akimirksniu pakeisti sukimosi momentą, taip pat gali sukelti rezonavimus, jei pakilimai ir ribos nustatomi agresyviai. Tvirčiausi nustatymai vertina variklį, jungtį, dėžę ir apkrovą kaip vieną susietą sistemą, tada formuoja pagreičio profilį ir sukimosi momento ribas, kad atitiktų tai, ką mechanika gali absorbuoti be protesto.
Taikymo pagrindu suformuotos kategorijos
Universalaus pobūdžio drive akcentuoja plataus suderinamumo ir kainos sąmoningumo funkcijas. Aukštos našumo drive paprastai teikia glaudesnę srovės kontrolę, turtingesnį atsiliepimų ir I/O galimybes, didesnį perdavimo pajėgumą ir pažangias diagnostikos sistemas.
Pasirinkimo įžvalga, kuri dažnai pasirodo realiuose projektuose, yra ta, kad aukštos našumo funkcijos labiausiai atsiperka, kai procesas reikalauja pakartojamumo esant trikdžiams, o ne tik tada, kai variklio reitingas yra didelis. Daugelis didelių ventiliatorių sistemų sklandžiai veikia naudojant universalius V/Hz, tuo tarpu mažesnės sistemos įtempimo kontrolei, indeksavimui ar griežtam greičio reguliavimui dažnai naudoja vektoriaus valdymą ir atsiliepimų galimybes.
Tipiniai skirtumai tarp drive klasių pirkimų diskusijose:
• Perdavimo pajėgumas ir šilumos modelio sudėtingumas
• Atgalinio ryšio prietaisų palaikymas (koduotuvas/rezoluotuvas)
• Diagnostikos gylis ir analizės/monitoringo įrankiai
• I/O lankstumas ir integracijos funkcijos
Staklių taikymams reikalingas didelis elektrinės dažnių pajėgumas, stabilus greičio reguliavimas ir apgalvotas variklio šilumos valdymas aukštuose RPM. Šie drive dažnai pabrėžia greitą perjungimo veikimą ir specializuotas variklio apsaugos funkcijas, pritaikytas staklėms.
Praktikoje, variklio pasirinkimo procesas paprastai būna sklandesnis, kai jis gerbia ašinio variklio izoliacijos sistemą ir guolių strategiją, o ne koncentruojasi tik į didžiausią greitį. Kai ašiniai varikliai greitai sugenda, pagrindinė priežastis dažnai yra šilumos valdymas, tepalavimas arba elektriniai guolių srovės, problemos, kurios gali būti itin erzinančios, būtent todėl, kad jos maskuojasi kaip valdymo problemos.
Ašinių variklių inžineriniai patikrinimai, kurie dažnai užkerta kelią nemaloniems siurprizams:
• Variklio izoliacijos tinkamumas greitiems kraštams ir aukštai dažnių
• Guolių srovės sumažinimo metodas
• Šilumos ribos numatomame greičio intervale
• Aušinimo ir tepalavimo prielaidos realiomis darbo ciklais
Vienfazio įėjimo varikliai yra dažni lengvoje pramonėje ir komercinėse aplinkose, tačiau jie dažnai yra sumažinti, nes įėjimo srovė didėja dėl tos pačios išėjimo galios. Trifazis įėjimas paprastai tolygiau paskirsto įėjimo srovę ir patogiau didėja didėjant galiai.
Praktinis įrengimo aspektas yra aukštesnio lygio pajėgumo planavimas. Nepatogūs atidarymai ir per daug įkaista laidai dažnai yra susiję su vienfazio įėjimo srovės nepaisymu, gaudymosi elgsena arba ignoruojant, kaip harmonikos veikia apsaugos prietaisus.
Aukštesnio lygio svarstymai, kurie dažnai lemia įrengimo rezultatus:
• Saugiklio/detektoriaus dydžio ir atidarymo kreivės parinkimas
• Laidų dydis ir temperatūros kilimas vamzdyje/įvade
• Gaudymo ir prieškrovos elgsena
• Harmonikos poveikis apsaugai ir aukštesnio lygio įrangai
Funkcinė terminologija
Daugeliui AC variklių, naudojamas sukimo momentas per greičio intervalą kyla iš įtampos ir dažnio derinimo. Šis derinimas yra VFD centro dalis, net kai valdymo metodas yra sudėtingas. Pagrindinė sąlyga išlieka ta pati: variklio srautas turi likti priimtinu lygiu, kad būtų išvengta silpno sukimo momento vienoje pusėje ir perkaitimo kitoje.
Pagrįstas būdas interpretuoti „VVVF“ yra kaip priminimas apie variklių fiziką, o ne kaip prekių ženklą. Kai atsiranda silpno sukimo momento ar netikėtų šildymų problemų, aiškumas dažnai greitai kyla iš patikrinimo, ar nurodyta įtampa, nurodytas dažnis ir srovės ribos iš tikrųjų atitinka variklio darbo tašką ir apkrovos poreikį.
CVCF apibūdina reguliuojamus energijos šaltinius, kurie skirti palaikyti įtampą ir dažnį pastoviu, dvasingumu panašūs į komunalinių paslaugų tiekimą. Šis modelis nėra orientuotas į variklio greičio keitimą.
Kai tikslas yra greičio valdymas, CVCF dažnai nukreipia mąstymą netinkama linkme. Greičio valdymas priklauso nuo kintamo dažnio, o stabilus sukimo momento elgesys paprastai seka, kai įtampa valdoma kartu su dažniu variklio ir taikymo sąlygų apribojimų.
Valdymo režimai mažos įtampos VFD

Kodėl valdymo režimas vis dar formuoja realaus pasaulio rezultatus šiuolaikiniuose mažos įtampos varikliuose
Šiuolaikiniai mažos įtampos, universalūs VFD (paprastai 380–690 VAC klasės, maždaug 0,75–400 kW, su 0–400 Hz išėjimu) dažnai atrodo panašiai iš techninės pusės, kas gali priversti komandas tikėtis panašaus elgesio mašinoje. Lauke skirtumas greitai pasireiškia: valdymo režimas iš esmės lemia, kaip variklis jaučiasi, kai procesas tampa chaotiškas, šaltieji paleidimai, apkrovos pokyčiai, ilgi laidai, ribiniai varikliai ir operatoriai, kurie neprižiūri derinimo.
Tai, ką valdymo strategija galiausiai paveikia, nėra abstraktu; tai tampa kasdieninių savybių, kurias pastebi priežiūra ir gamyba, rinkiniu.
Mažo greičio sukimo momento galimybės; greičio laikymo tikslumas; greitas reagavimas į apkrovos pokyčius; akustinis triukšmas; harmoninė iškraipymas; variklio šildymas/šiluminis stresas; jautrumas parametrų svyravimams; jautrumas paleidimo kokybei.
Praktikoje geriausias darbo režimas paprastai yra tas, kuris atitinka sukimo momento ir reakcijos reikalavimus, išlikdamas stabilus per temperatūros pokyčius, apkrovos svyravimus ir neidealias darbo sąlygas. Režimai, kurie gerai veikia tik demonstracijų metu, vėliau gali sukelti problemų, jei nuolat reikalaujama perderinti, skundų dėl triukšmo ar nestabilaus elgesio po variklio pakeitimo ar sistemos pakeitimų.
1 kartos: SPWM su fiksuota V/Hz (skalinis valdymas)
Skalinis valdymas išlaiko maždaug pastovų V/Hz santykį, kad variklio oro tarpa srautas išliktų artimas pageidaujamam lygiui keičiantis dažniui. Naudojant sinusoidalioji PWM (SPWM), įgyvendinimas yra paprastas, išlaidų profilis draugiškas, o iš esmės elgesys paprastai yra stabilus, kai apkrova yra švelni ir naudojamas greičio intervalas nėra ekstremalus.
Mažos dažnio metu komanduojamas statoriaus įtampa iš esmės yra maža. Tai lemia, kad statoriaus varža (I·Rs) nepagrįstai didelė, palyginti su taikoma įtampa, todėl srautas krenta žemiau numatyto lygio. Rezultatas nėra subtilus: sukimo momentas mažėja, variklis gali užstrigti apkrovos metu, o kai kurie įrenginiai išskiria nemalonų „pulsavimą“ arba svyravimus, kuriuos operatoriai interpretuoja kaip mechaninę problemą.
Dvi papildomos įtakos dažnai didina frustraciją netoli nulio greičio: keitiklio mirkimo laikas ir puslaidininkių įtampų kritimai. Šie nuostoliai toliau mažina efektyvią įtampą variklio terminaluose, kas yra viena priežasčių, kodėl du keitikliai su ta pačia kW plokšte gali elgtis pastebimai skirtingai lėtėjimo ir pozicionavimo metu.
Įrenginiuose, kurie laikosi skalarinio valdymo, bet vis tiek nori priimtino elgesio mažame greityje, paprastai kaupiami keli praktiški koregavimai. Kiekvienas iš jų gali padėti, tačiau kiekvienas taip pat gali sukurti naują gedimo režimą, jei jį per daug stumdysite.
• Įtampos didinimas / IR kompensacija: prideda papildomą mažos dažnio įtampą, kad kompensuotų I·Rs; gerina pradžios sukimo momentą, tačiau agresyvūs nustatymai gali perdidinti srautą variklyje ir padidinti šildymą.
• Paslydimo kompensacija: prideda dažnį kaip apkrovos srovės funkciją, kad sumažintų indukcinio variklio greičio kritimą; gali sutvirtinti konvejerius ir maišytuvus, tačiau gali sukelti medžiotojų dėmesį, kai mechanika yra elastinga arba srovės grįžtamasis ryšys yra triukšmingas.
• Daugiafunkcinės V/f kreivės: naudoja dalinį V/f formavimą, o ne vieną tiesią liniją; gali padaryti vieną keblią greičio juostą elgtis, o visur kitur tai duoda mažai.
• +Ramp formavimas ir srovės ribos: reguliuoja pagreitį/atmetimą ir ribojimo elgesį; dažnai patikimiau neleidžia trikdyti didelio inercijos apkrovoje nei vienas „maginis“ kompensacijos potenciometras.
Kai programa nori stipraus sukimo momento labai mažu greičiu, dažni apsisukimai ar aiškus sukimo momento ribojimas, skalarinis valdymas paprastai virsta mažų patobulinimų ciklu, kuris niekada tikrai neatrodo užbaigtas. Įrenginys gali veikti priimtinu lygiu po šildymo ir nuolatinės apkrovos, tačiau gali prarasti stabilumą po temperatūros pokyčių, variklio keitimų ar kabelio ilgio pokyčių, būtent tokio kintamumo, kuris verčia technikus nepasitikėti nustatymu, net jei jis atrodo gerai ant popieriaus.
Kartos 2: SVPWM su patobulintu skalariniu valdymu
Erdvės vektoriaus PWM (SVPWM) naudoja keitiklio perjungimo vektorius efektyviau nei tradicinis SPWM. Praktinis rezultatas yra didesnis DC-buso naudojimas ir mažesnis harmoninis iškraipymas naudojant tą pačią aparatūrą, kas paprastai verčia tai, kad turime daugiau naudingos pagrindinės įtampos, sklandesnę srovę ir dažnai mažiau variklio triukšmo ir šildymo.
Kai SVPWM sujungtas su srovės grįžtamuoju ryšiu ir mažos greičio įtampos/srauto kompensacija, dauguma skalarinių keitiklių jaučiasi mažiau „minkšti“ žemu greičiu ir labiau laikosi greičio vidutinio apkrovos pokyčių metu. Komandoms, kurios nori geresnio elgesio nesikeisdamos paleidimo kultūros, tas palaipsnis patobulinimas gali būti tikrai patrauklus.
Net su SVPWM skalarinis valdymas iš tikrųjų nesukuria atskirti srautą ir sukimo momentą. Sukimo momento reakcija vis dar yra per vidinę įtampų, srauto ir paslydimo santykį. Dinaminio pobūdžio reikalavimų metu keitiklis dažnai reaguoja, kai variklio būsena jau pasikeitė, o tai dažnai jaučiasi lėčiau nei metodai, kurie tiesiogiai reguliuoja sukimo momentą. Tai yra priežastis, kodėl SVPWM patobulintas skalarinis valdymas dažnai atrodo kaip tobulinimas, o ne didelis pokytis, skirtas aukštos kokybės judėjimui.
SVPWM gali pasiekti matomus pelnus, net jei nieko kito nepasikeičia, tačiau didesni patobulinimai paprastai atsiranda tik po to, kai peržiūrimos nustatymo pagrindai, kuriuos žmonės suprantamai skuba įvairiais paleidimo momentais.
Nustatymai, kurie dažnai nusprendžia, ar SVPWM pasirodys gamyboje:
• Pagrindinis dažnis
• Variklio plokštelės duomenys
• Mažiausias dažnis
• Įtampos/IR kompensacija
• Srovės ribos.
Daugelis skundų, žinomų kaip „mažo greičio nestabilumas“, kyla dėl konservatyvių srovės ribų arba neteisingų variklio parametrų, o ne dėl pačios PWM metodikos, kas gali būti nuolankus atradimas trikčių šalinimo metu.
Kartos 3: Vektoriaus valdymas
Ką priduria FOC: atskiros rankenos sukimo momentui ir srautui
Vektoriaus valdymas paverčia matuojamus fazinius srovės į sukasią nuorodą, kad srautą gaminanti srovė ir sukimo momentą gaminanti srovė galėtų būti reguliuojamos nepriklausomai, būdu, panašiu į DC variklio valdymą. Šiame etape variklio valdymas keičiasi iš paprasto reguliavimo elgesio į tiesioginį ir tikslų keitiklio valdymą. Atsipirkimas yra stipresnis sukimo momentas esant mažam greičiui ir greitesnė reakcija, nes sukimo momentas tampa tiesiogiai valdomu kintamuoju, o ne paslydimo šalutiniu poveikiu.
Be jutiklių ir uždaro kilpos vektoriaus: jums jaučiamas skirtumas mašinoje
• Be jutiklių vektorinė kontrolė: nustato rotoriaus padėtį / srovę naudodama įtampą, srovę ir variklio modelį; sumažina laidų ir sąnaudų kiekį; plačiai naudojama bendrajai pramonei; linkusi susidurti su sunkumais prie nulio greičio, nes atgalinė EMF yra maža, o modelio klaidos tampa neproporcingai įtakingos.
• Uždarytos kilpos vektorinė kontrolė: naudoja koduotuvą arba rezolverį; užtikrina nuoseklų nulio greičio sukimo momentą ir pakartojamą dinamiką; dažnai pasirenkama keltuvams, ritiniams, liftams ir preciziškai judantiems prietaisams; gali padaryti paleidimą mažiau nervingą, kai mechanika jautri sukimo momento svyravimams.
Parametrų jautrumas: Kaina, su kuria gyvenate po paleidimo
Vektorinė veikla labai priklauso nuo variklio parametrų ir srovės vertinimo. Keletas poveikių gali tyliai pakeisti šiuos parametrus įprasto veikimo metu, o pavaros pasitikėjimas bus toks didelis, kaip jos modelis.
Dažnai gamyboje pasitaikančios klaidos ir neatitikimai.
• Rotoriaus laiko konstantos svyravimas
• Temperatūros paveikto statoriaus varžos pokytis
• Magnetinis prisotinimas esant didesniam apkrovimui
• Ilgos variklio kabelių impedanso ir EMI poveikiai
Dažnas simptomų modelis pasirodo, kai sistema veikia sklandžiai šalta ir mažai apkrauta, bet vėliau tampa mažiau stabili, triukšminga arba nesugebanti išlaikyti nuoseklumo esant aukštai temperatūrai ar dideliems apkrovimams. Šios situacijos dažnai lemia nepasitikėjimą vektorine kontrole arba griežtesnius derinimo ir parametrų identifikavimo praktikų taikymus.
Derinimo praktikos, kurios paprastai užtikrina ramesnes instaliacijas
Stabilios vektorinės instaliacijos dažnai dalijasi keletu įpročių, kurie neskamba pagražintai, tačiau padeda išvengti ilgų derinimo sesijų vėliau.
• Patvirtinkite variklio duomenis realiomis laidų sąlygomis: kabelio ilgis, išvesties reaktoriai, žemė ir instaliacijos išdėstymas daro įtaką vertinimui ir EMI būdais, kuriuos laboratoriniai nustatymai retai užfiksuoja.
• Naudokite besisukančias automatinio derinimo funkcijas, kai tai leidžiama: statinis derinimas gali būti tinkamas ventiliatoriams ir siurbliams, tačiau didelio sukimo momento, mažo greičio darbai dažnai labiau pasinaudoja besisukančio identifikavimo.
• Derinkite valdymo juostos plotį su mechanika: per daug agresyvūs sukimo momento kilpos gali sukelti jungčių, atatrankų ir rezonansų sužadinimą; šiek tiek lėtesnė, tačiau gerai slopinama elgsena dažnai suteikia geresnį pralaidumą ir mažiau nepageidaujamų sutrikimų.
Praktinė taisyklė, kaip pasirinkti režimą nepergyvenant
Jei procesas yra jautrus mažo greičio sukimo momentui arba tikisi greito atsigavimo po apkrovos svyravimų, vektorinė kontrolė dažnai sumažina nemalonių staigmenų skaičių vėliau, nors nustatymo pastangos didėja. Jei procesas toleruoja greičio sumažėjimą ir retai veikia arti nulio greičio, skaliniai režimai dažnai užtikrina stovesnę kasdienę elgseną su mažiau reguliatorių, kurie gali būti neteisingai nustatyti.
Ketvirtoji karta: DTC (Tiesioginė sukimo momento kontrolė)
Tiesioginė sukimo momento kontrolė įvertina statoriaus srovę ir sukimo momentą statoriaus atskaitos sistemoje ir parenka keitiklio kaitos būsenas, kad išlaikytų srovę ir sukimo momentą histerezės juostose. Kadangi ji vengia tam tikros įprastos FOC diegimo struktūros, ji gali suteikti labai greitą sukimo momento atsaką ir stiprų trikdžių atmetimą. Taikymuose, kuriuose operatoriai pastebi kiekvieną sukimo momento sumažėjimą kaip produkto trūkumą ar proceso sutrikimą, toks atsakas gali būti labiau ramunantis nei gražiai lygi banga.
Dažnai pastebimi privalumai.
• Greitas sukimo momento atsakas staigių apkrovų pokyčių metu
• Stiprus mažo greičio sukimo momentas, kai vertinimas išlieka patikimas
• Palyginamai tiesioginė struktūra, kuri gali elgtis patikimai esant didesniam galios lygiui.
Išlaidos ir apribojimai, kurie reikalauja planavimo.
• Sukimo momento svyravimas ir kintama perjungimo dažnis
• Histerezės elgesys gali sukelti girdimą triukšmą ir sukimo momento pulsavimą, kuris išsiskiria žemo inercijos arba preciziškuose sistemose.
EMI ir šiluminio projektavimo sudėtingumas: kintamas perjungimas sudėtingina filtrų projektavimą ir gali pabloginti variklio akustiką, jei nėra tinkamai valdoma.
Priklausomybė nuo vertinimo kokybės: arti nulio greičio stebėtojo silpnos vietos gali pasirodyti, panašiai kaip be jutiklių vektorinėje kontrolėje, nors diegimai labai skiriasi pagal tiekėją.
DTC dažnai pasireiškia, kai sukimo momento svyravimai yra svarbesni už ultra-lengvą sukimo momentą ir kai pavarų / variklio derinys yra parinktas ir integruotas su šiuo lūkesčiu. Sunkiojoje pramonėje patrauklumas dažnai mažiau susijęs su aukščiausiais specifikacijomis ir daugiau dėl atsigavimo iš trikdžių būdais, kurie išlieka nuoseklūs be trapios derinimo.
Penktoji karta: Matricinis AC–AC keitimas
Matricinis keitiklis tiesiogiai paverčia AC įvestį į AC išvestį be didelės DC jungimo talpos banko. Tai keičia sistemos asmenybę: jis gali pagerinti įvesties galios koeficientą, sumažinti didelių energijos kaupimo komponentų ir leisti inherentinį dvikryptį galios srautą. Tuo pačiu metu tai keičia moduliavimo apribojimus, apsaugos metodus ir komutavimo reikalavimus, kurie dažnai didina koordinavimo naštą tarp valdymo ir galios aparatūros.
Matricos konversija reikalauja kruopščiai laiku sureguliuoto komutavimo, kad būtų išvengta įėjimo fazių trumpojo jungimo arba induktyvinių srovių kelių pertraukimo. Stabilaus be jutiklių elgesio ir stipraus žemo greičio sukimo momento pasiekimas paprastai reikalauja didelio tikslumo stebėtojų (flux, torque, kartais speed), greito realaus laiko skaičiavimų ir sudėtingos moduliacijos, kuri gali derinti PWM su panašiomis į histerezę sprendimų logikomis. Kai tai atliekama gerai, sukimo momento atsakas gali pasiekti milisekundžių masto elgesį, tačiau inžinerinis komforto ribos dažnai yra siauresnės nei tradiciniuose įtampos šaltinio keitikliuose (VSI), todėl komandos gali būti atsargios, nebent nauda aiškiai atsveria pridėtą sudėtingumą.
• Įtampos perdavimo santykio apribojimai: praktiškai didžiausia išėjimo įtampa yra apribota pagal įėjimą, kas gali sumažinti didelio greičio sukimo momento rezervą, nebent sistema būtų projektuojama atsižvelgiant į tai.
• EMC ir filtravimas: pašalinus DC jungtį, filtravimo naštą perkeliama ir tai gali komplikuoti atitikties užtikrinimą elektrinėje triukšmingoje aplinkoje.
• Patikimumo kompromisai: elektrolitinių kondensatorių pašalinimas gali pagerinti tarnavimo laiką kai kuriose darbų charakteristikose, tačiau keitiklis įveda sudėtingesnius komutacijos ir apsaugos reikalavimus, kurie keičia gedimų atsiradimo vietas.
Matricos keitikliai paprastai pateisinami, kai dominuoja dvikryptė energijos srovė, kompaktiškumas ar kondensatorių tarnavimo laiko klausimai, ir kai vieta gali palaikyti tokį inžinierinį ir priežiūros sudėtingumą, kuris iš to kyla. Juos sunkiau pateisinti, kai prioritetai pasvirę link greito diegimo, plačios paslaugų patirties ar didelio tolerancijos parametrų nežinojimo ir "pakankamai gerų" variklių duomenų.
Per šias kartas modelis išlieka nuoseklus: našumas gerėja, kai sukimo momentas ir srautas juda iš atsitiktinio elgesio į aiškiai reguliuojamus kintamuosius. Kompromisas tas, kad kiekvienas žingsnis į viršų paprastai labiau priklauso nuo modelių, jutiklių kokybės, paleidimo disciplinos ir mechaninio suderinamumo. Teoriškai stipresnis keitiklis vis dar gali nesugebėti, kai variklio duomenys yra neteisingi, kai mechaninė sistema sustiprina bangavimą, arba kai veikimas praleidžia laiką netoli stebėtojo silpnos regionas.
VFD savybės
VFD paprastai pelno savo reputaciją išmatuotame elgesyje, o ne reklaminiuose tekstuose. Tai, kas dažniausiai užbaigia debatą, dažnai po kelių ilgų paleidimo rytų prieš panelę, yra tai, kaip nuosekliai keitiklis keičia variklio atsaką pradedant, keičiant greitį ir dalinio apkrovimo veikimo metu. Tai tie momentai, kai senosios metodikos dažnai atsisako energijos, sklandumo ar įrangos tarnavimo.
Kasdieninėje inžinerinėje veikloje rezultatai yra labiau kartojami, kai elektrinė našumas ir procesų lūkesčiai yra vertinami kaip vienas dizaino siūlas (elektros sistemos ribos, variklio šilumos ribos ir procesų dinamikos sujungtos), o ne kaip du paralelūs kontroliniai sąrašai, kurie susitinka tik paleidimo metu.
Minkštas paleidimas ir mažesnis elektrinis/mechaninis stresas
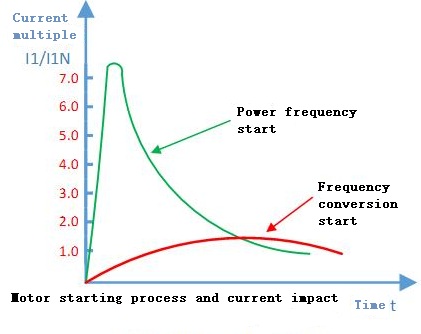
Apibrėžiantis bruožas VFD yra kontroliuojamas pagreitis, kuris įgyvendinamas koordinuojant įtampą ir dažnį rampoje. Naudojant tiesioginį paleidimą, įsijungimo srovė paprastai būna ~5–7× nominalios srovės diapazone, o neigiami aspektai greitai pasireiškia.
Įprasti tiesioginio paleidimo šalutiniai poveikiai:
• Įtampos sumažėjimas
• Nelaimingi išjungimai
• Kontaktorių dėvėjimasis
• Sujungimo/balto/dėžės smūgis.
Su VFD rampu, pradinė srovė dažnai lieka arčiau ~1.2–1.5× nominalios, nors tikri skaičiai vis dar priklauso nuo apkrovos profilio, pagreičio laiko ir sukimo momento reikalavimų. Kai ta srovės piką pavyksta išvengti, žmonės darbo vietoje dažnai jaučia tai, kol kas nors pradeda skaičiuoti: mažiau nustebintų žvilgsnių į pertraukiklio būseną, mažiau vidutinio pamainos pakartojimų ir ramesnis valdymo kabinetas pirmadienio rytų paleidimams.
Upstream įranga taip pat gauna naudos iš švelnesnio elektrinio profilio. Mažesnė įsijungimo srovė sumažina piką transformatoriams, generatoriams ir bendriems tiekėjams, ir sumažina galimybę, kad kitos jautrios apkrovos toje pačioje magistralėje patiria trumpą žemą įtampą. Klaidų šalinimo srityje tai yra viena iš tų permainų, kurios tyliai sumažina frustraciją: "atsitiktiniai" išjungimai nustoja būti atsitiktiniais, ir priežiūra nustoja persekioti laikinas simptomus, kurie buvo susiję su sunkiais paleidimais.
Kadangi sukimo momentas gali būti valdomas, kai greitis kyla, keitiklis gali išvengti staigaus sukimo momento pikio, kurį dažnai sukelia tiesioginis paleidimas. Tai pasireiškia kaip prognozuojamesnis mechaninis elgesys, ypač mašinos, kurios jau suteikė komandai šiek tiek nuolankumo.
Dažnos mechaninės pasekmės, kai sukimo momento rampas yra gerai suformuotas: ilgesnis diržo tarnavimas; mažiau sujungimų gedimų; sumažintos torsinės osciliacijos sukamuosiuose traukinyse.
Daugelyje įrenginių praktinis skirtumas nėra tai, ar apkrova pradeda veikti kartą, bet ar ji pradeda veikti taip pat kiekvieną kartą. Apkrovos su didele pradine trintimi, lipniu produktu ar šalčiu guoliais dažnai geriau reaguoja, kai greičio pakilimas yra derinamas sąmoningai, o ne spėliojant. Stabilus ir numatomas paleidimo elgesys padidina pasitikėjimą normalios operacijos metu.
Per agresyvus pagreitėjimo pakilimas gali sukurti srovės pikus ir mechaninį smūgį. Pernelyg lėtas pakilimas gali stumti variklį link perkaitimo mažo greičio metu, kai ventiliacijos aušinimas yra silpnas arba kai sukimo momento reikalavimas išlieka padidėjęs.
Įprastas paleidimo metodas, kuris dažnai atrodo stabilesnis (ir vėliau yra lengviau apsiginti), yra pradėti nuo konservatyvios pagreitimo, o tada ją trumpinti tik tada, kai procesas iš tikrųjų naudingas, stebint mažą signalų rinkinį, kuris retai meluoja:
Signalai, kuriuos reikia stebėti derinant pakilimą:
• Variklio išėjimo srovė
• Variklio temperatūra (arba šilumos modelis)
• Vibracijos pokyčiai
• Pakartotinio paleidimo nuoseklumas
Platus greičio valdymas, sklandžiai keičiant dažnį
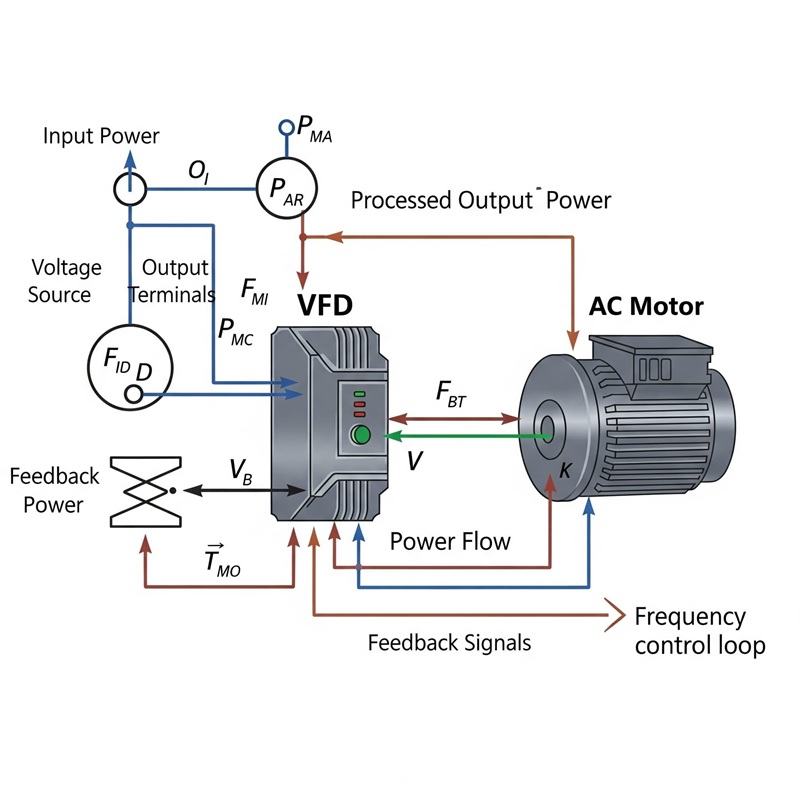
Kitas apibūdinantis bruožas yra greičio valdymas be mechaninio perdirbimo. Vietoj to, kad būtų keičiami polių poros ar pridedami pavarų etapai, VFD keičia tiekimo dažnį. Indukciniam varikliui sinchroninis greitis ir rotoriaus greitis paprastai išreiškiami kaip:
n₀ = 60f / P
n = 60f(1 − S) / P
Kur f yra dažnis, P yra polių skaičius, o S yra slydimas. Dažnio keitimas leidžia sklandžiai keisti greitį, išlaikant slydimą kontrolės, kurią valdiklis gali valdyti, ribose. Praktikoje tai reiškia stabilią proceso elgseną: konvejeriai gali atitikti aukščiau / žemiau srautus, siurbliai gali sekti paklausą, o ventiliatoriai gali išlaikyti slėgio nustatymus be sustojimų, kurie nusidėvi tiek aparatūrai, tiek kantrybei.
Punktas, kuris kartais būna pamirštas, kol atliekamas perdirbimas ar sugadintas produktas tai padaro akivaizdu, yra tas, kad sklandus greičio valdymas nėra tik patogumas. Sumažinta proceso kintamumo dažnai sumažina operatorių įsikišimą, ir tai gali sumažinti kokybės nuostolius, kurie niekada nepasirodo energijos skaitiklyje.
VFD valdymas labiausiai atsiperka, kai procesas praleidžia tikrą laiką nuo nominalaus greičio. Vietoj to, kad veiktų dideliu greičiu ir išmestų perteklių per slopinimą ar stabdymą, sistema gali veikti arčiau to, kas tuo metu iš tikrųjų reikalinga apkrovai. Tai paprastai gerina stabilumą ir sumažina nusidėvėjimą kontrolės elementams, kurie kitaip praleidžia savo gyvenimą kovodami su mašina.
Komponentai, kurie dažnai mažiau nusidėvi, kai greitis naudojamas valdymui:
• Slopinimo vožtuvai
• Įvažiavimo vožtuvai
• Šalutiniai keliai
• Mechaniniai stabdžiai, naudojami tempimui
Slydimas S yra daugiau nei kintamasis lygties; jis atspindi, kaip variklis generuoja sukimo momentą apkrovos metu. Variklio valdymas valdo slydimą netiesiogiai, koordinuodamas įtampą ir dažnį, kad variklis galėtų gaminti sukimo momentą, neįtraukdama perteklinės srovės.
Paleidimo metu naudinga stebėti sukimo momento paklausą visame greičio diapazone, o ne tik patogioje vidutinio greičio vietoje. Nustatymai, kurie atrodo tinkami vidutinio greičio metu, gali tapti nuviliantys greičio piko metu, o tas nusivylimas paprastai iškyla tuo mažiausiai patogiu metu, šaltų paleidimų, sunkių partijų ar po proceso sutrikimų metu.
Didelis energijos taupymo potencialas kintamo sukimo momento apkrovose
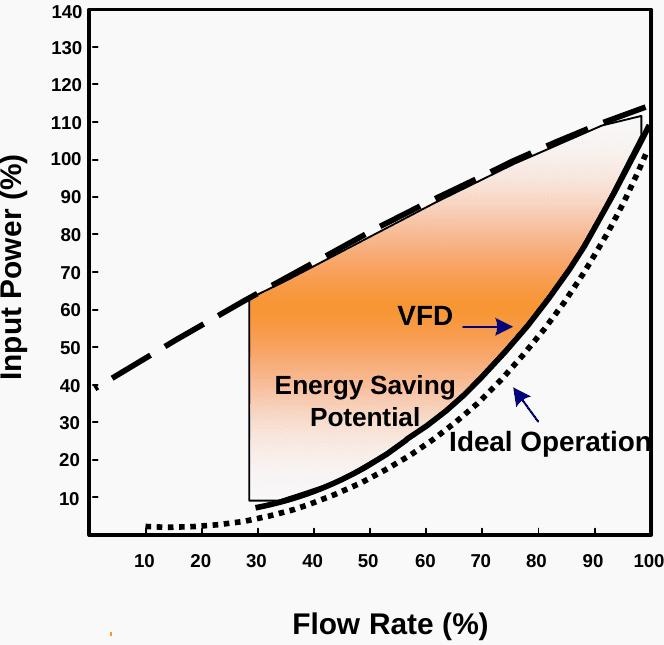
Energijos sumažinimas dažnai yra stipriausias kintamo sukimo momento apkrovose, tokiose kaip ventiliatoriai ir centriniai siurbliai. Afiniteto dėsniai paaiškina taupymo formą:
Afiniteto santykiai:
• Srautas ∝ Greitis
• Slėgis / Aukštis ∝ Greitis²
• Galia ∝ Greitis³
Kadangi galia keičiasi su greičio kubu, net nedideli greičio sumažinimai gali sukelti didelius galios sumažinimus. Būtent todėl slopinimo vožtuvai ir įvažiavimo vožtuvai dažnai seka greičio sumažinimo metu, kai paklausa svyruoja: slopinimas išeikvoja energiją kaip slėgio nuostolį, tuo tarpu greičio valdymas sumažina energiją, kurią sistema turi generuoti iš pradžių.
Veikimo aplinkose skirtumas dažnai matomas daugiau nei vienoje vietoje, kas yra patenkinama labai praktiniu būdu, nes tai patvirtina, kad valdymo strategija veikia taip, kaip prognozavo modelis:
Bendrieji operaciniai ženklai dėl sumažintos paklausos mažesniu greičiu:
• Mažesnis kW suvartojimas
• Tylesnis veikimas
• Mažiau šilumos sistemoje
• Mažiau vožtuvų ir vožtuvų aptarnavimo skambučių
Iš profesionalaus požiūrio, sutaupymai, kurie išlieka ilgesnį laiką, dažniausiai kyla iš VFD laikymo kaip dalies valdymo strategijos (nustatymų, ribų ir grįžtamojo ryšio), o ne kaip rankinės greičio valdymo rankenėlės, kuri driftuoja su įpročiais ir pamainų pageidavimais. Kai pavaros sistema integruota su aiškia logika, slėgio, srauto ar temperatūros valdymu su apsauginėmis ribomis, rezultatai paprastai išlieka stabilūs, net kai operatoriai keičiasi.
Dauguma sistemų veikia dalinėje apkrovoje didžiąją dalį savo darbo valandų. VFD pritaiko variklio įvesties galią pagal tikrąją paklausą, o ne priverčia dirbti viso greičio ir „valdo žemyn“ su nuostoliais. Tai dažnai sumažina energijos vartojimą, taip pat sumažina mechaninę apkrovą, nes sistema veikia su mažiau turbulencijos, mažesniais uždarymo nuostoliais ir mažiau greitais valdymo svyravimais, kurie erzina tiek įrangą, tiek operatorius.
Paprastas būdas patvirtinti taupymą yra palyginti realią galią (kW) stabilizuotose darbo taškuose prieš ir po greičio valdymo įgyvendinimo, o ne pasikliauti tik plokštelės prielaidomis. Šis matavimo prioritetas dažnai užkerta kelią nepatogiems pokalbiams vėliau, ypač kai sistemos kreivės, minimalūs srauto apribojimai ir valdymo derinimas keičia rezultatą.
Lauko veiksniai, kurie dažnai nuveda rezultatus toli nuo vadovėlinio vertinimo:
• Sistemos kreivės forma
• Minimalūs srauto ir galvos apribojimai
• Jutiklių išdėstymas
• PID derinimas
• Aplinkos arba cirkuliacijos elgesys
VFD charakteristikos
VFD apibrėžiančios charakteristikos gali būti sujungtos į tris rezultatus orientuotas temas, kurios išreiškiamos ta pačia kalba, kurią žmonės naudoja, kai nusprendžia, ar įrengimas „veikė“:
(1) Švelnesni pradžiai su mažesne įsiurbimo srove ir mažesne elektros/mechanine įtampa.
(2) Sklandi, plati greičio kontrolė per dažnio svyravimą su kontroliuojamu slydimu.
(3) Stiprus energijos sumažinimas kintamųjų sukimo momentų apkrovoms, nes galia greitai sumažėja sumažinus greitį.
Kai šios temos taikomos su praktiniu derinimu ir proceso žinomu valdymo logika, rezultatai dažniausiai būna nuoseklūs per pamainas ir sezonus, kas dažnai yra tai, ko komandos iš tikrųjų nori: mažiau netikėtumų, mažiau linijos sustojimo įvykių, ir rezultatai, kurie lieka stabilūs po to, kai montavimo komanda išvyksta.
Išvada
VFD našumas priklauso ne tik nuo variklio greičio keitimo. Stabilus veikimas reikalauja kruopštaus dažnio, įtampos, srovės reguliavimo, variklio parametrų, šilumos sąlygų ir apkrovos elgesio koordinavimo. Skirtingos valdymo strategijos subalansuoja sukimo momento reakciją, efektyvumą, stabilumą ir dinaminį našumą remiantis programos poreikiais. Kadangi pramoninės sistemos reikalauja didesnio efektyvumo, tikslumo ir patikimumo, VFD technologija ir toliau vystosi per geresnius valdymo metodus, apsaugos sistemas ir elektros elektronikos projektus, kurie palaiko modernias variklio varomas programas.
Dažnai užduodami klausimai [FAQ]
1. Kodėl VFD reguliuoja įtampą kartu su dažniu, o ne tik keičia dažnį?
VFD reguliuoja tiek įtampą, tiek dažnį, kad išlaikytų variklio magnetinį srautą stabilioje veikimo srityje. Jei dažnis sumažėja be tinkamos įtampos korekcijos, srautas susilpnėja, o sukimo momento pajėgumas smarkiai krenta, ypač esant žemam greičiui. Jei įtampa išlieka per aukšta veikimo dažniui, variklis gali imti per didelę magnetizuojančią srovę, didindamas šilumą ir apkraudamas izoliacijos sistemą. Įtampos ir dažnio koordinavimas leidžia įrenginiui palaikyti naudojamą sukimo momentą, stabilų srovės elgesį ir prognozuojamą šiluminį našumą keičiantis apkrovos sąlygoms.
2. Kodėl daugelis VFD problemų, priskiriamų varikliams, iš tikrųjų kyla iš variklio įėjimo pusės?
Daugelis problemų, priskiriamų varikliams, iš tikrųjų sukelia tai, kaip tiesioginės srovės keitiklio etapas sąveikauja su elektros tiekimu. Įprasti diodų tiesioginės srovės keitikliai ima nesinusoidinę srovę, kas įveda harmonikas ir gali destabilizuoti silpnus elektros energijos sistemų su dideliu šaltinio varžumu. Tokios simptomai kaip nerimą keliantys nutraukimai, transformatorių šildymas, įtampos nestabilumas ar periodiniai gedimai dažniausiai kyla iš santykio tarp įrenginio ir atvykstančios elektros energijos sistemos, o ne iš paties variklio. Įėjimo pusės komponentai, tokie kaip linijiniai reaktoriai, DC-link chokes ir EMI filtrai, dažnai pridedami stabilizuoti šias sąveikas.
3. Kodėl DC-link kondensatoriai laikomi viena labiausiai apkrautų komponentų VFD viduje?
DC-link kondensatoriai sugeria smūginę srovę, stabilizuoja autobuso įtampą ir laikinai saugo energiją greitų apkrovų pokyčių metu. Laikui bėgant, nuolatinis šiluminis stresas ir smūginės srovės poveikis palaipsniui blogina talpumo našumą. Įrenginys gali toliau dirbti net tuo metu, kai talpa blogėja, todėl problemą gali būti sunku pastebėti pradžioje. Galiausiai, įrenginys tampa jautresnis įtampos kritimams, regeneracinėms situacijoms ir laikiniems apkrovos pokyčiams, dažnai sukeldamas nepaaiškinamus nutraukimus ar nestabilų elgesį prieš išsiveržiant kondensatoriui.
4. Kodėl PWM nešiklio dažnio didinimas gerina variklio akustiką, bet didina šiluminį stresą įrenginyje?
Aukšta PWM nešiklio dažnio dažnis sukuria sklandesnį variklio srovę ir sumažina girdimą triukšmą, perkeliant perjungimo harmonikas virš labiausiai pastebimos klausymo ribos. Tačiau kiekvienas perjungimo įvykis sukelia nuostolius IGBT ir galios elektronikoje. Didėjant perjungimo dažniui, inverterio nuostoliai ir vidinis šildymas žymiai didėja. Tai sukuria praktinį inžinerinį kompromisą tarp tyliau veikiančio variklio ir priimtino šiluminio rezervavimo užtikrinimo VFD. Daugelis įrenginių, kuriuose frekvenčių derinimas turi tiesioginę įtaką ilgalaikei patikimumui ir apvalkalų aušinimo reikalavimams.
5. Kodėl regeneratyvios apkrovos dažnai sukelia DC perviršio gedimus lėtėjimo metu?
Kai variklis lėtėja arba jis veikiamas pačios apkrovos, jis pradeda veikti kaip generatorius ir grąžina energiją į DC autobusiuką. Jei regeneruota energija patenka į autobusą greičiau, nei ji gali būti išsklaidyta ar grąžinta į tinklą, DC įtampa greitai kyla ir sukelia perviršio apsaugą. Šis elgesys stipriai priklauso nuo apkrovos inercijos ir lėtėjimo agresyvumo. Daugelį perviršio problemų galima išspręsti pailginant lėtėjimo rampas arba tinkamai parinkus stabdymo rezistorius ir regeneratyvią įrangą, kad atitiktų realiai sistemoje saugomas mechanines energijas.
6. Kodėl vektorinė valdymo sistema paprastai viršija skaliarinę V/Hz valdymą mažo greičio ir apkrovos pokyčių metu?
Skaliarinis V/Hz valdymas reguliuoja variklio elgesį netiesiogiai, palaikydamas apytikslį įtampos ir dažnio santykį, kuris gerai veikia prognozuojamoje apkrovoje, pvz., ventiliatoriuose ir siurbliuose. Vektorinė kontrolė, ypač lauko orientuota kontrolė (FOC), tiesiogiai reguliuoja sukimo momento ir srauto generuojančių srovių komponentus atskirai. Tai leidžia įrenginiui reaguoti daug greičiau į apkrovos pokyčius ir palaikyti stipresnį sukimo momentą net netoli nulio greičio. Skirtumas tampa ypač akivaizdus taikymo srityse, kuriose reikia greito pagreičio, didelio pajėgumo momento arba jautrių greičio reguliavimo reikalavimų.
7. Kodėl vektoriniais valdomi įrenginiai gali tapti nestabilūs po temperatūros pokyčių ar variklio pakeitimo?
Vektorinė kontrolė glaudžiai priklauso nuo tikslaus variklio parametrų įvertinimo. Rotoriaus varža, statoriaus varža, magnetinis prisotinimas ir kabelio impedancija gali pasikeisti realių veikimo sąlygų metu. Temperatūros pokyčiai ir variklių pakeitimai dažnai pakankamai pakeičia šiuos parametrus, kad sumažintų įvertinimo tikslumą, ypač mažo greičio metu, kai stebėjimo modeliai tampa jautresni. Sistemos, kurios pradžioje veikia sklandžiai, vėliau gali tapti triukšmingos, nestabilios sukimo momento reakcijos ar nekonsistencijos greičio reguliavimo, jei variklio modelis nebelieka tikro elektrinio elgesio.
8. Kodėl automatinis derinimas laikomas vienu svarbiausių žingsnių VFD paleidimo metu?
Automatinis derinimas pritaiko variklio valdymo modelį prie tikrųjų variklio elektrinių savybių, o ne remiasi tik pavadinimo vertėmis. Tai pagerina srovės reguliavimą, sukimo momento reakciją, slydimo įvertinimą ir elgesį mažo greičio režimu. Daugelis įrenginių, automatinis derinimas yra ta vieta, kur sistema pereina nuo paprasto funkcionavimo prie sklandaus ir prognozuojamo veikimo. Sukasi automatinio derinimo procedūros yra ypač vertingos taikymuose, kuriems reikia stipraus mažo greičio sukimo momento arba tikslaus pereinamojo poveikio, nes jos fiksuoja variklio elgesį realių veikimo sąlygų metu.
9. Kodėl VFD žymiai sumažina energijos suvartojimą siurbliuose ir ventiliatoriuose, palyginti su throttling metodais?
Centifugaliniams siurbliams ir ventiliatoriams energijos suvartojimas seka afiniteto dėsnius, kur energija keičiasi maždaug greičio kubu. Tai reiškia, kad net ir vidutiniai greičio sumažinimai gali sukelti dideles energijos taupymo galimybes. Tradiciniai throttling metodai verčia variklį veikti maksimaliai greičiui, tuo pačiu mechaniškai ribodami srautą, tai yra energijos švaistymas, nes tai sukelia slėgio nuostolius. VFD vietoj to tiesiogiai sumažina variklio greitį, kad sistema generuotų tik reikiamą srautą ar slėgį, sumažindama energijos poreikį savo šaltinyje, o ne išsklaidyti perteklinę energiją.
10. Kodėl greitai perjungiančios modernios VFD technologijos didina susirūpinimą EMF ir guolių srovėmis?
Modernūs PWM valdikliai, ypač tie, kurie naudoja SiC arba GaN perjungimo įrenginius, generuoja ypač greitus įtampos perėjimus su dideliu dV/dt. Šie greiti kraštai gali sukelti bendrųjų režimų įtampas, elektromagnetinį trikdį ir klajojančias ašies sroves, kurios praeina per variklio guolius. Jei įžeminimo, kabelių šarvavimo, filtravimo ir jungimo praktika yra prasta, rezultatas gali būti ankstyvas guolių nusidėvėjimas, triukšmingi jutikliai, ryšio nestabilumas arba izoliacijos stresas. Aukštos kokybės įrenginiuose kabelių ir įžeminimo kokybė dažnai tampa vienodai svarbi kaip pats valdymo algoritmas.
Susijęs tinklaraštis
-
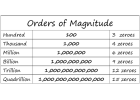
Kiek nulių per milijoną, milijardus, trilijonus?
![Kiek nulių per milijoną, milijardus, trilijonus?]()
2024/07/29
Milijonas reiškia 106, lengvai sugriebtas skaičius, palyginti su kasdieniais daiktais ar metiniais atlyginimais. Milijardas, lygi 109, pradeda tempt... -
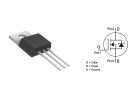
„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“
![„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“]()
2024/08/28
„IRLZ44N“ yra plačiai naudojamas N-kanalo galios MOSFET.Garsusi dėl puikių perjungimo galimybių, jis labai tinka daugybei programų, ypač galio... -
Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?
![Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?]()
2024/10/6
Mobiliojo telefono akumuliatoriaus įkrovimo problemos yra įprastos, tačiau juos galima efektyviai valdyti.Temperatūra vaidina didelę įtaką akum... -
BC547 TRANSISTORAS KLAUSIMAS VADOVAS
![BC547 TRANSISTORAS KLAUSIMAS VADOVAS]()
2024/07/4
BC547 tranzistorius dažniausiai naudojamas įvairiose elektroninėse programose, pradedant nuo pagrindinių signalo stiprintuvų iki sudėtingų osci... -
Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)
![Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)]()
2024/04/22
Silicio valdomi lygintuvai (SCR) arba tiristoriai vaidina pagrindinį vaidmenį „Power Electronics“ technologijoje dėl jų našumo ir patikimumo.Š... -
LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai
![LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai]()
2024/07/15
LR621 ir SR621SW mygtukų baterijos yra paplitusios kompaktiškuose elektroniniuose įrenginiuose, tokiuose kaip laikrodžiai, maži žaislai, skaiči... -
OP-AMP grandinių pagrindai
![OP-AMP grandinių pagrindai]()
2023/12/28
Sudėtingame elektronikos pasaulyje kelionė į jos paslaptis visada veda mus į grandinės komponentų kaleidoskopą, tiek išskirtinį, tiek sudėti... -
Palyginus NMO ir PMOS skirtumus ir programas
![Palyginus NMO ir PMOS skirtumus ir programas]()
2024/11/15
Suprantant efektyvias grandines, svarbu suprasti NMOS ir PMOS tranzistorių skirtumus.NMOS (N-type Metal-Oxide-Semiconductor) and PMOS (P-type Metal-O... -
Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose
![Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose]()
2025/09/20
Multiplekseriai yra komponentai skaitmeninėse sistemose, skirtos nukreipti kelis įvesties signalus į vieną išvesties liniją, naudojant dvejetain... -
CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti
![CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti]()
2025/09/15
Mygtukų baterijos, tokios kaip CR2450 ir CR2032, maitina daugybę kasdienių elektronikų, pradedant laikrodžiais ir nuotoliniais nuotoliniais mokes...




Karštos dalys
- PIC18F2585-H/SO
- GRM0335C1E9R4CD01D
- VI-27J-IV
- 08051A330JAT2A
- 12061C682MAT2A
- CGA9N4X7R2J224M230KA
- KA3844BDTF
- S71PL129JC0BAW9U0
- TPS61088RHLT
- CQ0603FRNPOYBN100
- VI-AIM-C1/F2
- M58LW032C90ZA1
- 1.5SMC36AT3G
- ADM213ARS
- CPC7592BC
- EFCH835MTCD1
- RC0805FR-07402KL
- 18121A242JAT2A
- MC34063AMEL
- MCM69P819TQ4
- TCN75-5.0MUA
- IP90C27-LC
- PI3HDMI1210-ABE
- C3225C0G2E473K250AA
- M3105D-MLAA
- UPC1342V
- AD7265BCPZ-REEL7
- CA91L860B-40CE
- CGA3E2X7R2A103M080AE
- IRMCF143TR
- THS4631DR
- LTC2600CGN#TRPBF
- BCM6421IPB-P11
- MCIMX6G3CVM05AA
- B06P-VL
- K4T1G084QD-ZCD5
- 10M04DAF256C7G
- TMP86C847UG-4JF9
- EN6337QI
- VI-J23-CZ
- BTM7740GXUMA1
- T491X477K010AT7280
- 74LVC16373DGGRE4
- CMVG-H007C-MG220D
- ME6945N
- SD8583STR
- H9YA1GA1GHAYAR-2YMR
- 74LVC8T245PW
- CM450DX-24T1
- UPD78F0818AGK