- lietuvių
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Taktiliniai jutikliai robotikoje: funkcijos, tipai, evoliucija ir taikymas
Katalogas
Perkurtos pagrindinės taktilinių jutiklių funkcijos
Taktiliniai jutikliai paprastai suprantami per dvi glaudžiai susijusias funkcijas: detekciją ir atpažinimą. Detekcija apima pirmąjį lietimo susijusių signalų sluoksnį, tuo tarpu atpažinimas plečia šią informaciją į struktūrizuotą interpretaciją. Kartu jos apibrėžia, kaip sistema jaučia kontaktą, interpretuoja fizinę sąveiką ir palaiko vėlesnius valdymo sprendimus.
Detekcija: Pirmasis taktilinės percepcijos sluoksnis
Detekcija susijusi su tiesioginiu kontakto signalų gavimu. Šiuo etapu sistema nustato, ar kontaktas įvyko, ir renka išmatuojamus fizinius duomenis iš tos sąveikos.
Tipinis detekcijos turinys apima:
• kontakto įvykdymas
• taikomos jėgos dydis
• kontakto padėtis
• judėjimo arba slydimo elgsena
• paviršiaus savybės, tokios kaip kietumas, tekstūra ir šiurkštumas
Iš pirmo žvilgsnio tai gali pasirodyti kaip paprasta jutimo užduotis. Tačiau realiose inžinerijos aplinkose detekcija retai būna tokia švari. Jutiklis gali greitai reaguoti, tačiau vis tiek generuoti nestabilias išvestis, o tokia netikslumų rūšis dažnai sukelia daugiau nusivylimo nei nedidelis jautrumo sumažėjimas. Praktikoje pasitikėjimą daugiausia pelno ne pernelyg jautri reakcija, bet pakartojama elgsena realiomis sąlygomis.
Detekcija sudaro pirmąjį ryšį tarp fizinės sąveikos ir mašinos interpretacijos. Kai robotinė sistema liečia objektą, pirmasis žingsnis yra paversti mechaninį kontaktą į elektrinius signalus, kuriuos galima matuoti ir apdoroti.
Šis procesas dažnai apima:
• jėgos dydžio jutimą
• slėgio pasiskirstymo žemėlapį
• kontakto lokalizavimą
• dinaminio įvykio sekimą
Jei prasideda slydimas, tikimasi, kad jutiklis užregistruos subtilius trinties susijusius pokyčius prieš tai, kai objektas iš tikrųjų išsiblaškys. Jei liečiama paviršius yra nelygus, jutimo procesas turėtų atskirti izoliuotus iškilimus nuo nuolatinės tekstūros ir išskirti abu iš platesnės kietumo struktūros. Realioje diegimo situacijoje gerai veikiantys sistemos nėra tik tos, kurios renka daugiau kintamųjų; jos yra tos, kurios užfiksuoja svarbiausius kintamuosius su tokio tikslumo lygiu, kuris iš tiesų tarnaus užduočiai.
Detekcijos etape taktiliniai jutikliai paprastai fiksuoja kelis fizinės informacijos tipus:
Šie paprastai apima:
• kontakto buvimas
• kontakto jėga
• kontakto vieta
• judėjimas ir slydimas
• paviršiaus savybės, tokios kaip kietumas, pritaikymas ir šiurkštumas
Kontaktas egzistencija yra pats pagrindinis signalas, tačiau jis turi didelę praktinę vertę suprasti pradžią ir saugumą susijusius atsakus. Kontakto jėga nurodo, ar sąveika išlieka švelni, kontroliuojama, ar per didelė. Kontakto vieta atskleidžia, kaip apkrova pasiskirsto per jutiklinę sritį. Judėjimas ir slydimas atskleidžia, ar objektas išlieka saugus, ar pradeda judėti santykyje su jutiklio paviršiumi. Paviršiaus savybės suteikia papildomą vertinimo sluoksnį, siūlydamos užuominas apie medžiagos būklę ir kaip atsargiai objektas turėtų būti tvarkomas.
Taikymo aplinkose, žaliavinių detekcijos signalų retai pasirodo tvarkinga ar pilna forma. Mažas vibracija, netolygus apkrovimas, temperatūros svyravimas ir kintantys kontakto kampai dažnai iškraipo išėjimą.
Dažni signalinių trukdžių šaltiniai apima:
• mažas mechaninis vibravimas
• netolygus apkrovimas
• temperatūros svyravimas
• kintantis kontakto kampas
Kartojant manipuliavimą, net du kontaktai, pritaikyti beveik ta pačia jėga, gali vis tiek sukelti šiek tiek skirtingas atsakymų kreives. Tai yra pažįstama ir kartais įkyriai stebėjimas taktiliniame darbe, ypač kai laboratorijos lūkesčiai susiduria su fizine kintamumu. Dėl to patikima detekcija priklauso ne tik nuo aparatūros jautrumo, bet ir nuo kalibravimo strategijos bei laiku sąmoningos interpretacijos. Daugybėje atvejų stabilus jutiklis nepablogintomis sąlygomis suteikia daugiau praktinės vertės, nei idealaus jautrumo demonstravimas tik kontroliuojamuose eksperimentuose.
Atpažinimas: aukštesnio lygio taktilinė interpretacija
Atpažinimas remiasi detekcija, paverčiant žaliu taktiliniu signalą į reikšmingą žinias apie kontaktinį objektą. Šiuo etapu sistema pereina nuo klausimo, kas įvyko kontakto taške, prie klausimo, kokio tipo objektas yra liečiamas, kokius fizinius bruožus jis rodo, ir kokių reakcijų reikėtų imtis.
Atpažinimas gali būti:
• formos identifikavimas
• dydžio įvertinimas
• kietumo vertinimas
• kontakto modelių interpretacija
• krašto struktūros analizė
• sugriebimo sąlygų vertinimas
Šis perėjimas nuo fizinio matavimo prie struktūrizuotos interpretacijos leidžia taktiliniam jutikliui palaikyti protingą manipuliavimą, o ne tik pranešti apie kontaktinius įvykius. Tai taip pat etapas, kur inžinerijos vertinimas tampa labiau matomas, nes interpretacija turi likti grindžiama signalais, kurie dažnai būna neišsamūs, triukšmingi ir konteksto priklausomi.
Atpažinimas reikalauja, kad sistema organizuotų suvokiamą informaciją į modelius, susijusius su žinomais objekto bruožais. Plati kontakto zona kartu su mažomis vietinėmis slėgio vertėmis gali nurodyti minkštą ar pritaikomą objektą. Susitelkusi jėgos struktūra, lydima mikro-slydimo, gali rodyti standų paviršių, kurį nepakankamai išlaiko. Kartojančios erdvės pasiskirstymai gali dar labiau atskleisti kraštus, kampus ar kreivą geometriją.
Galimi atpažinimo ženklai apima:
• plati kontakto zona su mažu slėgiu
• susitelkusi jėga su mikro-slydimu
• kartojami erdvės slėgio modeliai
Šiuo požiūriu taktilinis atpažinimas pranoksta paprastą klasifikaciją. Tai atspindi kontekstinį sąveikos skaitymą laiko eigoje. Patikimesnės sistemos linkusios interpretuoti lietimą kaip besivystantį įvykį, o ne kaip vieną sustabdyto matavimo, kas dažnai yra sąžiningesnis būdas spręsti, kaip fizinis kontaktas iš tiesų vystosi.
Atpažinimo kokybę stipriai lemia ankstesnės detekcijos kokybė. Jei kontakto lokalizacija yra netiksli, formos interpretacija tampa nestabili. Jei jėgos matavimai svyruoja, kietumo įvertinimas gali tapti klaidinančiu.
Dažni aukštupio ribojimai apima:
• netiksli kontakto lokalizacija
• jėgos matavimo svyravimai
• nestabili slėgio pasiskirstymo duomenys
• nekonstantinis laikinis atsakas
Dėl šios priklausomybės atpažinimas geriau suprantamas kaip sluoksniuotos jutiklių žarnos rezultatas, o ne kaip izoliuotas galutinis žingsnis. Praktikoje neįprasta matyti, kad klasifikacijos našumas atrodo įspūdingas laboratorijoje, o tada silpnėja realaus tvarkymo metu, kai objekto orientacija, sugriebimo greitis ir paviršiaus užteršimas keičia patį signalą. Šis atotrūkis gali būti nuvylantis, tačiau jis taip pat suteikia rimtą techninę priminimą: našumas priklauso ne tik nuo algoritmo sudėtingumo, bet ir nuo to, kaip tiksliai duomenys atspindi tikras kontakto sąlygas.
Apdorojimo žarna praktiniuose taktiliniuose sistemose
Praktiniuose taktiliniuose sistemuose aptikimas ir atpažinimas yra susiję per struktūrizuotą signalų apdorojimo grandinę. Jutiklis pirmiausia gamina analoginius išėjimus, atspindinčius mechaninę sąveiką. Šie išėjimai tada yra apdorojami, siekiant pagerinti signalų kokybę ir sumažinti iškraipymus. Po analoginio ir skaitmeninio konvertavimo filtravimas slopina triukšmą, išlaikant naudingus modelius. Braižymo išskyrimas identifikuoja informatyvius komponentus, o klasifikacijos arba išvedimo algoritmai žemėlapiuoja tuos komponentus į objekto atributus arba kontakto būsenas.
Tipiška apdorojimo seka apima:
• analoginio signalo generavimą
• signalo apdorojimą
• analoginį ir skaitmeninį konvertavimą
• filtravimą
• braižymo išskyrimą
• klasifikaciją arba išvedimą
Ši seka gali skambėti tvarkingai ant popieriaus, tačiau kiekviena stadija veikia tai, ką leidžiama matyti kitai stadijai. Kai naudinga informacija yra susilpninta arba pašalinta per anksti, vėlesni algoritmai turi mažai šansų ją atkurti.
Signalų apdorojimas naudojamas, nes žali taktiliniai išėjimai dažnai yra silpni, nelinearūs arba pažeidžiami trukdžių.
Dažni apdorojimo veiksmai apima:
• amplifikaciją
• impedanso pritaikymą
• bazinės linijos koregavimą
Šie veiksmai paruošia signalą vėlesnei analizei. Analoginis ir skaitmeninis konvertavimas tada nustato, kaip tiksliai nuolat siekiama užfiksuoti lietimo įvykį skaitmeniniu pavidalu. Jei mėginiai yra per lėti, slydimo susijusios variacijos gali praeiti nepastebėtos. Jei kvantizavimas yra per šiurkštus, subtilūs tekstūros susiję skirtumai gali dingti. Todėl geras sistemos dizainas priklauso nuo elektroninių apdorojimo parametrų suderinimo su stebimu mechaniniu elgesiu, kuris dažnai reikalauja daugiau susikaupimo ir derinimo nei pirmą kartą dizainas linkęs tikėtis.
Filtravimas daro daugiau nei pašalina nepageidaujamą triukšmą; jis tiesiogiai formuoja sistemos perceptinius ribas. Per didelis filtravimas gali ištrinti laikinas struktūras, susijusias su ankstyvomis slydimis arba tekstūruotu kontaktu. Neužtenkamai filtruojant gali būti leista triukšmui apsimesti reikšmingu įvykiu.
Tipiniai bruožų pavyzdžiai apima:
• slėgio centro poslinkį
• jėgos laiko nuolydį
• vietinę variaciją
• dažnių srities parašą
Ta pati įtampa pasirodo ir braižymo išskyrimui. Efektyvūs bruožai išlaiko fizinę svarbą, tuo pačiu sumažindami nereikalingą sudėtingumą. Veikiančiose sistemose interpretuojami bruožai dažnai pasirodo ypač naudingi, nes jie leidžia inžinieriams sekti gedimų atvejus, tobulinti valdymo elgesį ir vengti nepatogios situacijos, kurios modelis teikia atsakymus, kurie atrodo tikslūs, tačiau lieka sunkiai paaiškinami.
Kai bruožai yra išgaunami, klasifikavimo algoritmai priskiria prasmingumą kontakto įvykiui.
Šie algoritmai gali būti naudojami:
• atskirti objektų kategorijas
• įvertinti medžiagos klasę
• nustatyti stabilų sugriebimą prieš slydimą
• identifikuoti pasikartojančius kontakto modelius
Vis dėlto klasifikacija neturėtų būti vertinama kaip siaura tikslumo varžybų. Modelis su šiek tiek mažesniu išmatuotu tikslumu gali geriau pasirodyti diegiant, jei jis labiau fiškuoja ir reaguoja labiau prognozuojamai esant jutiklio paklaidai arba aplinkos variacijai. Iš sisteminės perspektyvos, patikima taktilinė inteligencija dažnai yra sukurta per disciplinuotą nenusakomos tvarką, o ne agresyvius prisitaikymus idealiems duomenų rinkinams.
Santykis tarp aptikimo ir atpažinimo
Aptikimas ir atpažinimas dažnai apibūdinami kaip atskiros funkcijos, tačiau praktikoje jie lieka giliai tarpusavyje priklausomi. Aptikimas suteikia matomą lietimo struktūrą, o atpažinimas suteikia šiai struktūrai operacinę prasmę. Jei aptikimas neturi tikslumo, atpažinimas tampa trapus. Jei atpažinimas nebūna, aptikimas lieka aprašomas, nesuteikdamas pakankamai krypties veiksmams. Dėl šios priežasties veiksmingos taktilinės sistemos dažnai yra projektuojamos su jutiklių aparatu, signalų apdorojimu ir sprendimų logika, tyčia suderinta su numatytu manipuliavimo uždaviniu.
Robotų sugriebimo metu aptikimas gali pirmiausia patvirtinti kontaktą ir išmatuoti jėgos paskirstymą. Tada atpažinimas interpretuoja, ar objekto yra minkštas, kietas, slystantis, centruotas ar neteisingai išdėstytas.
Ši interpretacija gali vadovauti:
• sugriebimo koregavimui
• judėjimo planavimui
• saugos atsakui
Šioje uždarosios kilpos aplinkoje taktilinis jutiklis tarnauja kaip aktyvios valdymo logikos dalis, o ne kaip pasyvus matavimo kanalas. Todėl stipriausios sistemos dažnai yra orientuotos į užduotį. Jos nesiekia jutikti kiekvieną kintamąjį su lygiaverčiu akcentu. Vietoj to, jos koncentruojasi į informaciją, kuri tiesiogiai palaiko stabilų, informuotą ir techniškai pagrįstą veiksmą.
Platesnis pagrindinių vaidmenų supratimas
Pagrindinės taktilinių jutiklių funkcijos gerokai viršija paprastą prisilietimo aptikimą. Giliau, jie palaiko struktūrizuotą fizinį supratimą per sluoksniuotą sensingą, signalo apdorojimą ir interpretaciją. Aptikimas fiksuoja stebimus kontaktus. Atpažinimas paaiškina, ką tie faktai rodo apie objektą ir sąveiką. Tarp šių dviejų sluoksnių yra platesnis inžinerinis iššūkis taktilinei intelektui: išlaikyti fiziškai naudingą informaciją, tuo pačiu konvertuojant ją į veiksmingą žinias. Gerai suprojektuota taktilinė sistema išsiskiria ne todėl, kad ji gamina daugiau duomenų, bet todėl, kad ji konvertuoja kontaktą į protingą sprendimą su pakankamu greičiu, tikslumu ir patikimumu, kad palaikytų realaus pasaulio sąveiką.
Taktilinių jutiklių evoliucija ir techninė plėtra

Taktiliniai jutikliai 1970-aisiais
Taktilinių jutiklių tyrimai lėtai pažengė per 1970-uosius, kai robotikos sistemos buvo daugiausia sukurtos tam, kad nustatytų, ar kontaktas įvyko, ir įvertintų taikomo jėgos dydį. Dauguma tų laikų taktilinių sistemų daugiausia orientavosi į šių dviejų pagrindinių klausimų atsakymus. Ši apribota prieiga atspindėjo platesnę robotikos technologijų būklę tuo metu. Valdymo architektūros buvo santykinai paprastos, kompiuterinės ištekliai buvo riboti, o mechaninė integracija dažnai sukeldavo didesnių iššūkių nei patys jutiklių elementai.
Dėl to ankstyvieji taktiliniai jutikliai paprastai turėjo mažą erdvinį skiriamąjį gebėjimą, ribotą jautrumą, trumpą tarnavimo laiką ir nestabilų našumą po pakartotinio apkrovimo sąlygų. Nors šie prietaisai galėjo palaikyti pagrindines operacijas, susijusias su kontaktu, jie retai užtikrindavo nuoseklumą, reikalingą subtiliems manipuliavimo užduotims ar veikimui neaiškiose aplinkose. Daugelis ankstyvųjų inžinerinių eksperimentų parodė, kad iššūkis viršijo slėgio aptikimą. Inžinieriai taip pat turėjo išlaikyti patikimą signalo kokybę nepaisant pakartotinio deformacijos, temperatūros svyravimų ir paviršiaus nusidėvėjimo. Ši patirtis nustatė svarbų principą, kuris ir toliau daro įtaką taktilinių jutiklių plėtrai šiandien: naudinga taktilinė analizė reikalauja vienalaikio pažangos signalo kokybėje, mechaniniame lankstume ir sistemos tvirtume. Visos šios srities istorijos metu šis balansas dažnai išskyrė sėkmingas praktines sistemas nuo žadančių laboratorinių prototipų.
Sensing technologijos 1980-aisiais
Per 1980-uosius taktilinių jutiklių tyrimai įžengė į daug greitesnės plėtros laikotarpį. Tyrėjai išplėtė savo darbą už vienos principo prietaisus ir pradėjo tirti platesnį jutiklių technologijų spektrą, įskaitant rezistinius, kapacitivinius, piэzoelektrinius, optinius, ultragarso, šiluminius ir magnetinius metodus. Ši diversifikacija įvyko todėl, kad kiekvienas jutiklių mechanizmas pasiūlė unikalias privalumus, kartu pristatydamas savo apribojimus. Inžinieriai dažnai turėdavo subalansuoti konkuruojančius reikalavimus, susijusius su jautrumu, juostos plotu, struktūriniu lankstumu, triukšmo imunitetu, gamybos sudėtingumu ir kaina.
Rezistiniai taktiliniai jutikliai paprastai buvo lengvai gaminami ir integruojami į didesnes sistemas, tačiau ilgalaikė nuokrypiai galėjo sumažinti matavimo patikimumą. Kapacitiniai jutikliai pasiūlė didelį jautrumą ir mažą energijos suvartojimą, nors jie reikalavo atsargaus ekranavimo ir stabilios elektroninės paramos grandinių. Piэzoelektriniai jutikliai veiksmingai reagavo į kintančias jėgas, tačiau buvo mažiau tinkami matuoti statines apkrovas. Optiniai taktiliniai jutikliai užtikrino didelį skiriamąjį gebėjimą ir stiprų atsparumą elektromagnetiniam trikdžiui, tačiau dažnai reikėjo sudėtingesnių pakavimo struktūrų. Tyrimams pažengus, vis labiau aiškėjo, kad nė viena jutiklių principas negalėjo patenkinti kiekvienos paraiškos. Todėl praktinės dizaino strategijos persikėlė link jutiklių technologijų pasirinkimo pagal užduoties reikalavimus, o ne siekiant universalaus sprendimo.
Taktilinė duomenų apdorojimo ir aktyvi eksploracija
1980-ieji taip pat pasižymėjo reikšminga pažanga taktilinių duomenų apdorojime ir aktyvioje taktilinėje eksploracijoje. Šis vystymasis atspindėjo svarbų pokytį, kaip tyrėjai vertino taktilinį jutiklių našumą. Taktilinės sistemos efektyvumas nebepriklausė vien nuo medžiagų savybių ar keitiklio dizaino. Našumas vis labiau priklausė nuo to, kaip taktinė informacija buvo apdorota ir interpretuota sąveikaujant su aplinka.
Pramoninė automatika atliko didelį vaidmenį varant šią transformaciją. Robotas turėjo gebėti aptikti slydimą, įvertinti kontakto sąlygas, identifikuoti paviršiaus savybes ir realiu laiku pritaikyti sugriebimo jėgą. Praktinės diegimo metu tyrėjai nuolat atrado, kad žali tactile signalai turėjo ribotą prasmę patys savaime. Vertinga informacija atsirado tik po kalibravimo, filtravimo, ypatybių išgavimo ir užduoties specifinės analizės. Dėl to taktilinio jutiklio istorija tapo ne tik geresnės aparatinės įrangos pasakojimu, bet ir istorija apie kontakto matavimų transformavimą į veiksmingą valdymo informaciją.
Taktilinė vaizdų formulavimas ir integruota percepcija 1990-aisiais
1990-aisiais taktilinių jutiklių tyrimai tapo platesni, sistematiškesni ir vis labiau tarpdisciplininiai. Dėmesys persikėlė nuo individualių jutiklių elementų prie visapusių jutiklių sistemų, įtraukiančių jutiklių architektūrą, taktilinį vaizdavimą, formos atpažinimą, aktyvią percepciją ir integruotas robotines sistemas. Šiuo laikotarpiu taktilinė percepcija taip pat konceptualiai subrendo. Vietoj to, kad būtų laikoma papildomu komponentu, pridėtu sistemos vystymo pabaigoje, taktilinė percepcija pradėjo būti pripažinta kaip nepriklausomas percepcijos kanalas su savo erdvinėmis savybėmis, laikinėmis dinamikomis ir funkcinėmis svarbomis.
Taktilinis vaizdavimas leido išplatinti kontaktinę informaciją, kuri buvo pateikta panašiu būdu kaip vizualiniai duomenys. Ši galimybė atvėrė naujas galimybes raštų atpažinimui ir objektų charakterizavimui. Tyrimai formos atpažinimo srityje dar labiau įrodė, kad taktilinė informacija gali atskleisti detales, kurių vizualinės sistemos dažnai sunkiai įgyja. Šios pranašumai tapo ypač akivaizdūs, kai objektai buvo užblokuoti, deformuojami, atspindintys, panardinti ar esantys ankštuose aplinkose. Praktinė patirtis nuosekliai parodė, kad kai vizualinė informacija tampa nepatikima, taktilinė informacija dažnai tampa vertingesnė. Dėl to taktilinė percepcija palaipsniui perėjo iš pagalbinio vaidmens į centrinę poziciją robotinėje manipuliacijoje ir percepcijoje.
Medicininės taktilinių jutiklių taikymo galimybės 2000-ųjų pradžioje
2000-ųjų pradžioje įvyko dar viena didelė transformacija, kai taktilinė percepcija išsiplėtė į medicinines ir lauko taikymo sritis. Šis poslinkis atspindėjo tiek technologinius patobulinimus, tiek augančią pripažinimą taktilinio grįžtamojo ryšio svarbos reikalaujančiose veiklos aplinkose.
2002 metais taktiliniai jutikliai buvo integruoti į kateterius, naudojamus endoskopinei chirurgijai, siekiant įvertinti audinių kietumą ir sumažinti pernelyg didelės jėgos taikymo riziką. Šis pasiekimas buvo ypač svarbus, nes minimaliai invaziniai procesai riboja tiesioginį taktilinį grįžtamąjį ryšį ir reikalauja, kad chirurgai labai pasikliautų netiesiogine informacija. Net dalinis taktilinės pojūčio atstatymas pagerino procedūrinį saugumą ir tikslumą.
2003 metais Japonijos tyrimų komanda sukūrė trigubą piezoelektrinį taktilinį jutiklį robotiniam pirštui ir pritaikė jį kepenų simuliacijos užsieniai, naudojamai minimaliai invaziniam chirurgijos mokymui. Šis darbas parodė, kad taktilinė percepcija gali palaikyti ne tik tiesioginę manipuliaciją, bet ir simuliacijas, mokymą bei įgūdžių vystymą. Gerai suprojektuoti taktiliniai sąsajos padėjo vartotojams atskirti subtilius jėgos variacijas ir sumažino laiką, reikalingą prisitaikyti prie sudėtingų procedūrų.
Taktilinė percepcija povandeninei ir lauko robotikai
2009 metais Vokietijos mokslininkai įgyvendino taktilinės percepcijos sistemą ant pulko įkvėpto povandeninio roboto, leidžiančio autonomiškai aptikti kliūtis ir tyrinėti jūros dugną. Šis projektas iliustravo strateginę taktilinės percepcijos vertę aplinkose, kur matomumas yra ribotas, apšvietimo sąlygos prastos arba vandens kokybė trukdo optinėms sistemoms. Tokiose situacijose lietimas gali tapti vienu iš patikimiausių aplinkos informacijos šaltinių.
Nuo kontakto aptikimo iki intelektualios percepcijos
Atsižvelgiant į visumą, taktilinės percepcijos vystymas rodo aiškų progresą nuo pagrindinio jėgos aptikimo iki sudėtingų percepcijos sistemų, gebančių palaikyti uždarosios grandinės valdymą sudėtingose aplinkose. Gilus šio vystymosi reikšmė slypi ne tik taikymo plėtros, bet ir besikeičiančiose lūkesčiuose taktilinės percepcijos technologijoms.
Taktilinis jutimas išsivystė iš pasyvaus kontakto detektoriaus į aktyvią sąsają tarp mašinų ir jų aplinkos. Svarbiausi pažangumai įvyko, kai tyrėjai pripažino lietimą kaip unikalią suvokimo kanalą, o ne tik kaip vizijos pakaitalą. Taktilinė informacija gali atskleisti tokias savybes kaip standumas, tekstūra, slydimas, vietinė geometrija ir sąveikos ketinimai. Žvelgiant į priekį, būsimas pažanga greičiausiai priklausys mažiau nuo izoliuotų jautrumo gerinimų ir daugiau nuo pažangių medžiagų, mechaninio dizaino, signalų interpretacijos ir valdymo strategijų integracijos vieninguose jutimo rėmuose. Šios srities istorija jau parodė geresnių jutiklių vertę. Taip pat svarbu, kad vis labiau suprantama, kad geresnė sąveikos interpretacija dažnai daro dar didesnę įtaką sistemos našumui.
Taktilinių jutiklių klasifikacija
Taktiliniai jutikliai gali būti interpretuojami tiek plačiąja, tiek siaurąja prasme.
Plačiąja prasme jie apima lietimo, slėgio, jėgos, slydimo, temperatūros, paviršiaus tekstūros ir vibracijos suvokimą.
Siaurąja prasme jie sutelkti į mechaninę sąveiką, susidarančią kontakto sąsajoje tarp roboto sistemos ir išorinio objekto.
Inžineriniu požiūriu, siauresnis vaizdas dažnai yra tiesioginis, nes jis derina matavimo tikslus su suėmimu, manipuliacija, kontakto reguliavimu ir judėjimo valdymu. Šis skirtumas iš pirmo žvilgsnio gali atrodyti nuosaikus, tačiau jis dažnai pašalina konceptualinį šiukšlyną ir padeda dizaino diskusijoms būti pagrįstoms matuojamu elgesiu.
Labiau naudojama klasifikacijos pakopa žiūri už funkcijos ribų ir taip pat atsižvelgia į fizinį principą, kuris paverčia kontakto įvykius į išmatuojamus signalus.
Įprasti funkciniai grupiai apima kontakto jutiklius, jėgų-momento jutiklius, slėgio jutiklius ir slydimo jutiklius.
Šios grupės lieka informatyvios, tačiau jų ribos dažnai išsitrynė realioje taikyme. Vienas jutimo vienetas gali reaguoti į normalią jėgą, tangentinę jėgą ir pradinį slydimą tame pačiame sąveikoje. Dėl šios priežasties klasifikacija pagal transdukcijos metodą dažnai suteikia švaresnę techninę struktūrą. Tai paaiškina ne tik tai, ką jutiklis aptinka, bet ir tai, kaip jis elgiasi triukšmo, nuolatinio krūvio, pakavimo ribų, kalibravimo slėgio ir sistemos lygio integracijos apribojimų sąlygomis. Realiame inžineriniame darbe ši antroji klasifikacijos pakopa dažnai išsprendžia debatus, kuriuos grynai funkciniai ženklai palieka neišspręstus.
Funkcinis taktilinių jutiklių požiūris
Funkciniu požiūriu taktiliniai jutikliai dažniausiai grupuojami pagal fizinę kiekį arba įvykį, kurį jie turėtų užfiksuoti.
Kontakto jutikliai
Kontakto jutikliai nustato, ar fizinis kontaktas įvyko tarp jutimo paviršiaus ir objekto. Jų išvestis gali būti binarinė arba paremta slenksčiu, tačiau tas akivaizdžiai nuosaikus atsakas dažnai nustato visos sąveikos sekos toną. Roboto suėmime paprastas kontakto signalas gali apriboti per didelį uždarymo jėgą, sumažinti susidūrimo sukeltą žalą ir palaikyti įvykio sukeltą valdymo logiką. Daugelis veikiančių sistemų prasideda nuo patikimos kontakto deteckcijos prieš pereinant prie didesnio sudėtingumo jėgos vertinimo.
Praktinis taikymas nuolat atskleidžia tą pačią pamoką: kai pirmasis kontaktas aptinkamas per vėlai arba kai signalas atvyksta su per daug triukšmo, žemupio valdymas tampa sunkesnis. Inžinieriai dažnai greitai pajunta šią problemą, nes net gerai derinamas valdiklis praranda ramybę, kai pirmas fizinis signalas yra neaiškus.
Jėgų-momento jutikliai
Jėgų-momento jutikliai matuoja jėgas ir momentus, veikiančius kontakto sąsajoje. Jie tarnauja situacijoms, kuriose sistema turi daryti daugiau nei patvirtinti kontaktą; ji taip pat turi interpretuoti kryptį, didįjį ir sukimo efektą. Ši galimybė palaiko įgudus manipulavimą, pritaikytą surinkimą ir įrankių naudojimą.
Jų indėlis yra padėti robotui koreguoti padėtį, suėmimą ir judėjimą, kai apkrovos subtiliai keičiasi. Praktikoje jėgos tikslumas dažnai nepasako visos istorijos.
Stabilus koordinatų transformavimas, mažas ašių sukibimas, pakartotinai montuojamas.
Šie veiksniai dažnai stipriai formuoja bendrą našumą. Patyrę dizaineriai paprastai tai supranta su tam tikru nusivylimu, nes elegantiškos jutiklių specifikacijos gali prarasti daug savo patrauklumo, kai montavimo nuoseklumas pradeda iškreipti duomenis.
Slėgio jutikliai
Slėgio jutikliai fiksuoja normalios apkrovos erdvinę paskirstymą kontakto srityje. Tai daro juos gerai pritaikytus taktilinėms matricos, dirbtinei odai, suėmimo vertinimui ir objekto formos įvertinimui. Slėgio žemėlapis suteikia daugiau nei bendrą jėgos didumą.
• Jis rodo, kur apkrova koncentruojasi.
• Jis rodo, kaip apkrova keičiasi laikui bėgant.
• Jis rodo, ar esamas kontakto modelis rodo stabilų laikymą ar vietinį perkrovimą.
Daugybėje manipuliacijos užduočių paskirstytos slėgio informacijos reikšmė yra didesnė nei vienos galutinės jėgos vertės, nes realus kontaktas retai įvyksta vienoje idealizuotoje vietoje. Tai yra vienas iš priežasčių, kodėl tankios slėgio matricos nuolat patraukia dėmesį, net kai laidų ir signalų apdorojimo reikalavimai bando dizaino komandos kantrybę.
Slydimo jutikliai
Slydimo jutikliai nustato santykinį judėjimą arba judėjimo pradžią tarp kontaktinio paviršiaus ir objekto. Jų vaidmuo tampa ypač svarbus, nes sėkmingas sugriebimas priklauso ne tik nuo jėgos taikymo, bet ir nuo to, kad pastebėtumėte, kai tos jėgos nebeužtenka. Ankstyvas slydimo nustatymas suteikia valdymo sistemai galimybę padidinti sugriebimo jėgą prieš visiška objekto praradimą.
Praktinėse aplinkose naudingiausi slydimo signalai dažnai yra tie, kurie atskleidžia mikro judėjimą prieš matomą gedimą. Signalai, kurie tik patvirtina slydimą, kai tai akivaizdu, yra gerokai mažiau naudingi. Tas trumpas pereinamasis laikotarpis turi neįprastą svarbą manipuliacijoje, o daugelis inžinierių po to, kai mato, kaip kitaip perspektyvūs sugriebimai sugenda per trupinę sekundės, įgyja pagarbą.
Klasifikacija pagal transdukcijos metodą
Funkcinė klasifikacija apibūdina jutimo tikslą, tuo tarpu klasifikacija pagal transdukciją paaiškina vidinį mechanizmą, kuris generuoja signalą. Projektavimo sprendimams šis požiūris dažnai yra atskleidžiantis, nes jis tiesiogiai daro įtaką jautrumui, linijiškumui, tvirtumui, kainai, gamybai ir suderinamumui su robotine įranga. Tai taip pat suteikia realesnį vaizdą apie tai, ko jutiklis reikalauja po prototipo etapo, kai optimizmas dažnai susiduria su integracijos disciplina.
Piezoresistinės taktinės jutikliai
Piezoresistinės jutikliai veikia keisdami elektrinį pasipriešinimą taikant mechaninę apkrovą. Jie plačiai naudojami, nes principas yra paprastas, elektra yra palyginti paprasta, o kaina gali likti priimtina. Jie taip pat gerai prisitaiko prie matricos integracijos, kas daro juos patrauklius didelio ploto taktinėms odoms ir slėgio žemėlapių paviršiams.
Jų didžiausias patrauklumas slypi praktiškume. Juos palyginti lengva pagaminti, suderinti ir pritaikyti daugeliui užduočių. Šis patogumas paaiškina, kodėl jie taip dažnai pasirodo prototipuose ir komerciniuose konceptuose. Tuo pačiu jų trūkumų negalima ignoruoti.
Pasipriešinimo svyravimas, histerezė, temperatūrinė jautrumas, ilgalaikis medžiagos nuovargis.
Šie efektai gali sumažinti matavimo patikimumą. Esant pakartotinėms apkrovoms, signalas gali svyruoti, net kai taikoma jėga nesikeičia. Tai daugiau nei nedidelis teorinis nepatogumas; tai dažnai sukuria kalibravimo naštą ir daro uždarosios ritės jėgos valdymą mažiau prognozuojamą laikui bėgant.
Įgyvendinimo patirtis dažniausiai rodo tą pačią kryptį: piezoresistinės jutikliai veikia geriau, kai dizainas anksčiau pripažįsta jų trūkumus.
Medžiagos pasirinkimas, kompensacijos strategija, perkaliibravimo procedūra.
Šie dizaino pasirinkimai dažniausiai yra svarbesni nei idealizuotos statinės charakteristikos ant popieriaus. Tas išvados nėra glamour, bet tai dažnai yra ten, kur prasideda tvirtas inžinerinis sprendimas.
Optiniai taktiniai jutikliai
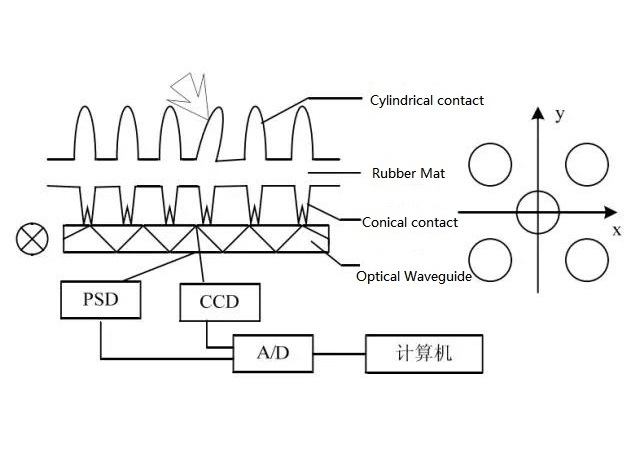
Optiniai taktiniai jutikliai nustato deformaciją matuodami šviesos intensyvumo, šviesos kelio, atspindžio, lūžio ar vaizdo ypatybių pokyčius jutimo struktūroje. Kadangi jutimo principas yra atskirtas nuo tiesioginio elektrinio deformacijos nurodymo, šie jutikliai gali pasiūlyti stiprią imunitetą elektromagnetiniam triukšmui ir gali pateikti gausią erdvinę informaciją.
Jų įspūdingiausias privalumas yra informacijos tankis. Optiniai metodai gali užfiksuoti detalią kontakto geometriją, deformacijos laukus ir, kai kuriais dizainais, šlyties susijusias schemas. Tai daro juos labai vertingais objekto atpažinimui, paviršiaus charakterizavimui ir subtiliai manipuliacijai. Išplėstinėse sistemose optiniai taktiniai jutikliai gali veikti beveik kaip kontaktinės sluoksnių vaizdavimas, suteikdami inžinieriams detalių lygį, kurio sunku nepaisyti, kai jie mato, kaip tai gerai veikia.
Prekybos kaina slypi struktūrinėje sudėtingumoje.
Dėmesingas pakavimas, kontroliuojamas apšvietimas, tikslus sutapimas, ne trivialus vaizdo ar signalo apdorojimas.
Šie reikalavimai nėra atsitiktiniai. Veikimas gali sumažėti, kai vidinis optinis kelias pasislenka, kai elastomeras sensta, arba kai teršalai keičia atspindžio elgseną. Realiai naudojant, konceptas, kuris atrodo elegantiškai laboratorijoje, gali tapti atkakliai sudėtingu kaip produktas, daugiausia dėl to, kad mechaninis tvirtumas ir optinė nuoseklumas yra sunkiau išlaikomi nei tikėtasi. Dėl šios priežasties optiniai taktiniai jutikliai dažnai yra labiausiai įtikinantys, kai turtinga perceptinė informacija tikrai kompensuoja pridėtą sistemos naštą.
Kapacitiniai taktiniai jutikliai
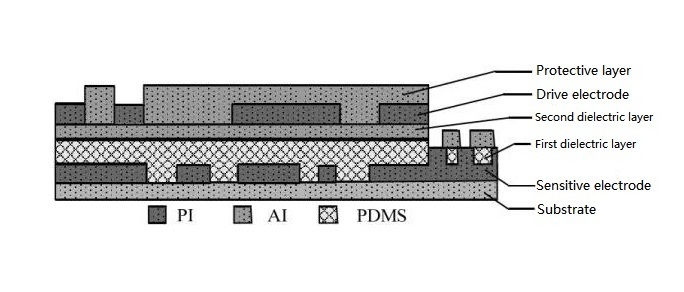
Kapacitiniai lietimo jutikliai matuoja jėgą arba slėgį per capacitansų pokyčius, kuriuos sukelia elektrodų poslinkis, kontaktinės srities pokyčiai arba dielektrinė deformacija. Jie žinomi dėl didelio jautrumo, mažo energijos suvartojimo ir didelio reagavimo greičio. Dėl tikslios lietimo matavimo, jie dažnai stebimi su didele optimizmu.
Didelis kapacitinio jutiklio privalumas yra tas, kad maži struktūriniai pokyčiai gali sukelti matomus elektros atsakus. Tai palaiko lengvo lietimo ir subtilaus slėgio kaitos aptikimą, kas yra labai naudinga laikiniame sąveikos ir delikataus sugriebimo procese. Kapacitinės struktūros taip pat gali būti plonos ir lankstios, todėl gerai tinka paskirstytoms jutiklių paviršiams.
Tuo pačiu metu šie jutikliai yra pažeidžiami keliais trikdžiais.
Parazitinė kapacitacija, aplinkos triukšmas, drėgmės poveikis, elektromagnetinis trukdymas.
Tokie veiksniai gali sukelti nestabilumą arba netikrus pokyčius, ypač tankiuose jutiklių masyvuose ir kompaktiškose robotinėse surinkimuose, kur signalų linijos yra glaudžiai supakuotos. Praktikoje naudojamas našumas dažnai priklauso nuo diegimo disciplino, o ne tik nuo teorijos.
Šarvas, žemės prijungimas, grandinės išdėstymas, nuskaitymo architektūra.
Šie aspektai dažnai lemia, ar tikėtinas jautrumas virsta patikimais duomenimis. Daugelis komandų atranda, kad kapacitiniai pojūčiai atrodo apgaulingai paprasti principo lygmenyje, tačiau integracijos metu tampa žymiai tikslesni.
Magnetiniai laidūs lietimo jutikliai
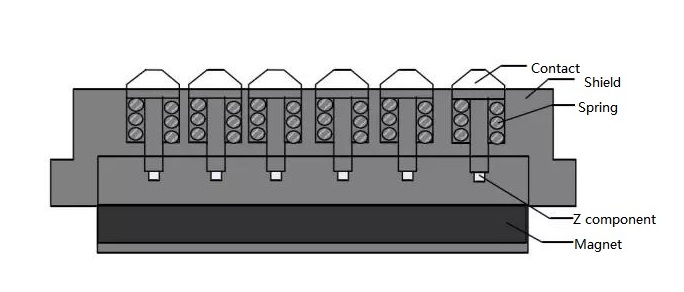
Magnetiniai laidūs lietimo jutikliai konvertuoja jėgos sukeliamus pokyčius magnetiniame lauke į elektrinį išėjimą. Jų struktūros dažnai derina deformuojamą terpę, magnetinius elementus ir lauko jautrius komponentus, tokius kaip Hall prietaisai arba magnetoresistiviniai elementai. Šis metodas gali palaikyti kompaktiškus dizainus, praktinį jautrumą ir kai kuriais atvejais, gerą toleranciją mechaniniam nusidėvėjimui elektriniame sąsajoje.
Vienas patrauklus bruožas yra tas, kad mechaninė deformacija ne visada reikalauja tiesioginio elektrinio kontakto matavimo taške. Tai gali pagerinti patvarumą ir išplėsti struktūrinių dizaino galimybes. Magnetiniai metodai taip pat gali palaikyti daugiašalį jutiklį, kai magnetinis laukas sąmoningai formuojamas ir matuojamas per kelis ašis.
Vis dėlto, šie jutikliai yra mažiau paplitę pagrindinėse robotinėse platformose. Priežastys pranoksta tik jutiklio našumą.
Išoriniai magnetiniai trikdžiai, pakavimo apribojimai, kalibravimo sunkumai, ribota pramoninė standartizacijos istorija.
Visi šie veiksniai įtakoja jų paplitimą. Vis dėlto, ši klasė dažnai gauna mažiau dėmesio, nei vertas. Kai reikia kompaktiškų trimatinių jėgos signalo ir aplinkos sąlygos yra valdomos, magnetinis jutiklis gali pasiūlyti subalansuotą kelią tarp struktūrinio paprastumo ir turtingesnės informacijos. Tai toks pasirinkimas, kuris pradžioje gali nesugebėti dominuoti diskusijose, tačiau tinkamoje aplikacijoje gali tapti stebėtinai įtikinantis.
Pjezolektriniai lietimo jutikliai
Pjezolektriniai lietimo jutikliai generuoja elektrinį krūvį, kai yra veikiami mechaniniu stresu. Jie ypač veiksmingi dinaminio jėgos aptikimo srityje, nes greitai reaguoja ir gali gaminti aukštą signalų ir triukšmo santykį laikotarpiuose. Tai daro juos tinkamus smūgio jutikliams, vibracijos aptikimui, tekstūros susijusiems įvykiams ir greitos kontakto pasikeitimo stebėjimui.
Jų apribojimas taip pat gerai žinomas: jie paprastai nėra tinkami statinio jėgos matavimui, nes generuotas krūvis paprastai silpnėja laikui bėgant. Dėl to, jie puikiai aptinka pokyčius, tačiau nejaučia stabilios vertės nuolatinio krūvio sąlygomis. Ši charakteristika silpnina technologiją automatiškai; ji tiesiog apibrėžia, kur metodas veikia užtikrintai, o kur ne.
Kai kurie stipriausi dizainai atsiranda, kai ši dinamika yra vertinama kaip sąmoningas bruožas. Manipuliavimo sistemose pjezolektriniai elementai dažnai efektyviausiai veikia, kai juos derina su kitais jutiklių modaliais. Jie gali užfiksuoti greitus įvykius, kuriuos gali praleisti lėtesni ar labiau dreifuoti linkę jutikliai. Šiuo požiūriu, jie natūraliai tinka hibridinėms lietimo architektūroms, kur statinė ir dinaminių duomenų informacija yra atskirta, o ne priverstinai sujungta į vieną kompromisinį kanalą.
Dominuojančios inžinerijos kryptys lietimo jutiklių plėtroje
Istoriniai ir šiuolaikiniai darbai šiose jutiklių kategorijose rodo kelias pasikartojančias kryptis.
Daugiašalis jutiklis
Šiuolaikiniai lietimo jutikliai juda nebe tik paprasto normalaus jėgos aptikimo link, o siekia vienu metu matuoti normalų jėgą, pjovimo jėgą, sukimosi momentą ir slydimo susijusią judesį.
Normali jėga, pjovimo jėga, sukimosi momentas, slydimo susijęs judesys.
Šis pakeitimas atspindi gilesnį manipuliavimo supratimą. Tikras kontaktas yra iš esmės daugialypis. Jutiklis, kuris matuoja tik vieną komponentą, gali būti naudingas, tačiau negali visiškai apibūdinti, kaip objektas yra laikomas, stumiamas, sukamas ar paleidžiamas. Augant manipuliavimo užduočių įgūdžių lygiui, daugiaešiai jutikliai atrodo mažiau kaip pasirinktinė rafinacija ir labiau kaip natūrali reakcija į fizinę tikrovę.
Aukštesnis masyvo tankis
Kitas pastebimas kryptis yra tankesnių taktilinių masyvų plėtra. Didesnis tankis gerina erdvinį sprendimą ir leidžia jutiklinei paviršiai užfiksuoti smulkesnius kontaktų pasiskirstymo, krašto vietos, vietinės deformacijos ir tekstūros požymių detalius.
Kontaktų pasiskirstymas, krašto vieta, vietinė deformacija, tekstūros požymiai.
Tačiau didesnis tankis taip pat padidina laidumo sudėtingumą, skaitomosios informacijos poreikius, skersinių trikdžių riziką ir duomenų apdorojimo naštą. Tai sukuria pažįstamą inžinerinį kompromisą: daugiau duomenų automatiškai netampa naudingesne informacija, nebent žemyn esančia elektronika ir algoritmai yra pasiruošę ją efektyviai apdoroti. Kiekvienas, dirbęs su tankių masyvų integracija, paprastai išsivysto mišrių jausmų, nes turtingesnių duomenų patrauklumas dažnai sklinda kartu su staigiu sistemos naštos padidėjimu.
Tiekimo sistemos integracija
Taktiliniai jutikliai vis dažniau kuriami kaip visos robotų sistemos dalys, o ne kaip izoliuoti komponentai.
Mechaninis atitikimas, signalo apdorojimas, įterptinis apdorojimas, valdymo politika, struktūrinis tvirtinimas.
Šie elementai dabar yra labiau tarpusavyje susiję. Tai atspindi platesnį inžinerinių vertinimų pokytį. Taktilinis jutiklis įgauna vertę ne tik iš grynos jautrumo, bet ir iš gebėjimo pagerinti elgesį sistemos lygmenyje. Daugelis dizainų nepavyksta ne dėl to, kad jutiklių principas yra silpnas, bet todėl, kad jutiklis, valdiklis ir mechaninė struktūra buvo kuriami taip, tarsi priklausytų atskiriems pasauliams. Tas nesusipratimas lengva pamiršti kuriant koncepciją ir sunku atleisti, kai sistema pasiekia visišką veikimą.
Pagrįstas jutiklių pasirinkimo vaizdas
Nėra vieno taktilinio jutiklių metodo, kuris būtų universalus. Kiekviena technologija atstovauja skirtingą pusiausvyrą tarp jautrumo, patikimumo, laikino atsako, gaminamumo, erdvinio sprendimo ir integravimo naštos. Tinkamiausias pasirinkimas priklauso nuo tikslinės užduoties, veikimo aplinkos ir aplinkinės valdymo architektūros.
• Dideliems, mažos kainos paskirstytiems jutikliams, piezoatsparūs metodai lieka labai patrauklūs.
• Aukštos raiškos kontaktų vaizdavimui, optiniai metodai dažnai teikia didesnę išraiškos galią.
• Lengviems ir jautriems statiniams prisilietimo matavimams, talpiniai jutikliai lieka įdomūs, kai trikdžiai laikomi po kontroliu.
• Dinaminio įvykių aptikimo atveju, piezoelektriniai jutikliai išlaiko aiškų pranašumą.
• Kompaktiniam daugiaešiam jutiklimui gerai valdomomis sąlygomis, magnetiniai metodai siūlo perspektyvius variantus.
Praktinis pasirinkimo principas yra pasirinkti jutiklių metodą pagal svarbiausią gedimų režimą. Jei pirminė problema yra praleisti mažus statinius kontaktus, vienas jutiklių tipas išsiskirs. Jei pirminė problema yra nesugebėjimas aptikti greitų slydimų ar smūgių, kitas tipas atrodys prasmingiau. Ši perspektyva dažnai приведет prie geresnių dizaino rezultatų, nei pasirinkti jutiklį vien tik pagal maksimalų jautrumą ar pagal populiarumą skelbiamuose tyrimuose. Tai reikalauja sąžiningesnio pokalbio su taikymu, o ta sąžiningumas paprastai atsiperka.
Taktilinių jutiklių klasifikacija nėra tik kategorijų pavadinimų pratimai. Tai išreiškia ryšį tarp fizinio kontakto, signalo generavimo ir robotų funkcijos. Funkcinė klasifikacija paaiškina, kokios rūšies kontaktų informacija yra ieškoma. Transdukcijos pagrindu klasifikacija paaiškina, kaip ta informacija yra fiziškai gaunama ir kokie techniniai kompromisai ją lydi.
Platesnė srities kryptis rodo, kad ateities taktiliniai sistemos labiau pasikliaus integruotomis jutiklių strategijomis ir mažiau atskirų jutiklių našumu.
Daugiausia mechanizmų, tanki erdvinė percepcija, tiesioginis suderinamumas su valdymo sistemomis.
Šiame kontekste, efektyviausias taktilinis jutiklis dažnai nėra tas, kuris turi įspūdingiausias savarankiškas specifikacijas, bet tas, kuris išlaiko patikimą kontaktinę informaciją tikrose veikimo sąlygose. Tas išvada gali skambėti suvaldyta, tačiau ji ir toliau skiria poliruotas koncepcijas nuo sistemų, kuriomis inžinieriai gali pasitikėti, kai darbas nustoja būti teorinis.
Taktilinių jutiklių taikymas
Taktiliniai jutikliai gerokai pažengė toliau už pagrindinį slėgio aptikimą ir dabar remia platesnį pažangių funkcijų spektrą protezuose, pramoninėje automatizacijoje ir nešiojamose elektroninėse priemonėse. Jų indėlis neapsiriboja tik kontakto nustatymu. Jie paverčia fizinę interakciją į informaciją, kuri gali būti nuosekliai interpretuojama, patikimai veikiama ir suderinta su realiomis veikimo sąlygomis. Taikomuose sistemose jų praktinė vertė pasireiškia, kai žali signalai yra išverčiami į veiksmingas sprendimus.
• Kiek tvirtai suimti
• Kada sustoti judėti
• Kaip atskirti saugų kontaktą nuo žalingos jėgos
• Kaip grąžinti prasmingą atsiliepimą vartotojui
Dėl to ši sritis daugiau nebesiremia vien jautrumu. Ji dabar vis labiau vadovaujasi signalo interpretavimu, mechaniniu suderinamumu ir sistemos lygio integracija.
Taktiliniai Jutikliai Protezų Sistemose
Protezų technologijoje taktiliniai jutikliai turi atlikti daug daugiau nei tik registruoti išorinę jėgą. Gilus tikslas yra atkurti lietimo formą, kurią žmogaus kūnas gali interpretuoti su mažesniu įtempimu ir didesniu intuityvumu. Natūrali oda neaprašo kontakto per vieną nenutrūkstamą vertę. Ji priklauso nuo specializuotų mechanoreceptorių, kurie transformuoja slėgį, vibraciją ir tekstūrą į impulsais pagrįstą neuralinę veiklą. Šių impulsų laikas ir dažnis neša sluoksniuotą informaciją.
• Objekto forma
• Minkštumas
• Slydimas
• Jėgos dydis
Šis biologinis principas nuosekliai paveikė pažangių protezų jutiklių sistemų architektūrą.
Tradiciniai dirbtiniai taktiliniai jutikliai dažnai generuoja analoginius įtampos ar pasipriešinimo pokyčius. Nors tokie išėjimai lieka naudingi matavimams, jie natūraliai nesusiję su įvykių vedamu signalizacijos stiliumi nervų sistemoje. Dėl to reikalingas papildomas skaičiavimas, kad nuolatiniai išėjimai būtų paversti į spike tipo modelius, tinkančius neuralinei stimuliacijai ar biomimetiniam valdymui. Ši vertimo stadija dažnai nusprendžia, ar atsiliepimas atrodo patogus, ar psichologiškai varginantis dėvėtojui. Sistema gali dirbti su įspūdinga tikslumu laboratorijoje, tačiau vis tiek jaustis nepatogiai kasdieniniame naudojime, jei jos atsiliepimas atvyksta vėlai, svyruoja netikėtai ar sumažina pojūčius iki per daug supaprastintų signalų.
Neuromorfinis Kodavimas ir Sensorinė Natūralumas
Neuromorfinis kodavimas išsiskyrė kaip iškilusi kryptis, nes jis bando siaurinti atstumą tarp dirbtinio jutiklinių ir biologinės komunikacijos. Vietoj to, kad dėmesys būtų sutelktas tik į signalo dydį, neuromorfinės strategijos pabrėžia laiko struktūrą, retą įvykių generavimą ir adaptuojamą kodavimą. Šis požiūris gali sumažinti duomenų naštą, sutrumpinti atsako laiką ir sukurti atsiliepimų modelius, kurie atrodo arčiau natūralaus lietimo. Vienas praktiškas dizaino pamokas tapo vis aiškesnis: natūralumas dažnai priklauso mažiau nuo kompleksinio maksimalizavimo ir labiau nuo prasmingų perėjimų išsaugojimo.
• Pirmasis kontaktas
• Didėjanti apkrova
• Slydimo pradžia
Atliekant tikrus manipuliavimo užduotis, šie perėjimai paprastai turi daugiau operacinės vertės nei statiniai jėgos dydžiai.
Patirtis iš protezų naudojimo nuolat rodo, kad dėvėtojai dažnai teikia pirmenybę stabiliai ir prognozuojamai atsiliepimui, kuris yra teoriškai turtingesnis, bet sunkiau interpretuojamas. Kas nors, bandantis laikyti popierinį puodelį, užsegtį marškinį ar pakelti trapų objektą, gauna nedaug iš per didelės detalės, jei ta detalė pasiekia netikėtai. Kas tikrai padeda, yra laiku pateikiama informacija, mažinanti suspaudimo, kritimo ar pakartotinės sureguliavimo galimybę. Todėl daugelis sėkmingų dizainų pabrėžia mažo uždelsimo kodavimą, sukalibruotus jėgos slenksčius ir pakartojamus sensorinius signalus.
Lankstūs Sąsajai ir Neuralinė Integracija
Lankstūs medžiagos ir minkštos sąsajos plačiai naudojamos, nes protezų sistemos turi bendrauti su kreivomis paviršiais, judančiais sąnariais ir jautria biologine audiniu. Standūs jutiklių platformos gali siūlyti tikslumą, tačiau dažnai sukelia diskomfortą, lokalizuotą stresą ir silpną ilgalaikį pritaikymą. Lankstūs taktiliniai sluoksniai, laidūs elastomerai ir tampūs jungtys pagerina mechaninį suderinamumą ir leidžia jutiklinėms paviršiams išlikti funkcionuojančiomis lenkiant ir nuolat deformuojantis. Šis mechaninis suderinamumas veikia ne tik patogumą, bet ir signalo patikimumą bei tarnavimo laiką.
Tiesioginės neuralinės sąsajos pristato dar vieną sudėtingumo lygį. Kai jutiklio išėjimas yra skirtas periferinėms nervams, stuburo keliams ar žievės sistemoms, inžinieriai turi spręsti kelis glaudžiai susijusius reikalavimus.
• Tikslus laikas
• Saugi stimuliacija
• Ilgalaikė sąsajos stabilumas
Iššūkis todėl yra dvipusis. Jutiklis turi tiksliai aptikti išorinius įvykius, o sąsaja turi pristatyti tuos įvykius vartotojui suprantama forma, kurią jis gali palaipsniui išmokti ir pasitikėti. Praktikoje pasitikėjimas auga, kai atsiliepimai išlieka nuoseklūs per pakartotinas užduotis. Net techniškai pažangi sąsaja gali būti atidėta, jei jos atsakymai akivaizdžiai keičiasi dėl prakaito, lizdo judėjimo ar įprasto mechaninio nusidėvėjimo.
Likusios kliūtys protezų priėmimui
Nepaisant didelio pažangos, kelios kliūtys vis dar lėtina platesnį priėmimą.
• Ilgalaikis biokompatibilumas
• Energijos efektyvumas
• Signalo nuokrypis
• Individualizuota kalibracija
Kita nuolat egzistuojanti problema yra ta, kad protezų jutimas dažnai vertinamas kontroliuojamomis bandymo sąlygomis, kurios visiškai neatspindi kasdienio gyvenimo. Laboratoriniai pasiekimai su standartiniais objektais automatiškai neperduodami drėgnoms paviršiams, besikeičiančioms temperatūroms ar greitiems, neplanuotiems judesiams. Brandesnė plėtros strategija turėtų apimti realaus pasaulio užduočių įvairovę nuo pat pradžių, o ne vertinti tai kaip kažką, ką reikia tirti tik pabaigoje.
Taktiliniai jutikliai pramoninėje automatizacijoje
Pramoninėje automatizacijoje taktilinis jutimas stiprina robotų našumą, pridėdamas fizinį suvokimą rieše, griebtuve ar galiniame efektyve. Ši papildoma suvokimo sluoksnis leidžia mašinoms daryti daugiau nei tik sekti geometrines trajektorijas. Jos gali reaguoti į realias kontakto sąlygas, reguliuoti jėgą surinkimo metu, aptikti netikėtus kliūtis ir tvarkyti delikatias dalis didesniu tikslumu. Kaip gamybos aplinkos tampa greitesnės ir kintamesnės, taktilinis jutimas vis daugiau laikomas tvirto inžinerinio pagrindo dalimi, o ne kaip pasirenkama patobulinimu.
Platus pramoninių užduočių spektras naudingas ištaktilinio atsiliepimo.
• Robotas surinkimas
• Įterpimas
• Poliravimas
• Griebimas
• Paviršiaus patikra
Pavyzdžiui, įterpimo užduotyse regėjimas gali suteikti apytikslį išlygiavimą, tačiau galutinis sėkmė dažnai priklauso nuo subtilių jėgos pokyčių, kurie atskleidžia kontakto kryptį, trintį ar užstrigimą. Poliravimo ar nuvalymo metu palaikomas tinkamas kontakto spaudimas tiesiogiai formuoja paviršiaus kokybę ir įrankių ilgaamžiškumą. Griebimo atveju taktilinis jutimas padeda aptikti pradinį slydimą prieš prarandant objektą. Šie pavyzdžiai rodo, kad jutikimas papildo regėjimą, teikdamas vietinę fizinę realybę, kur tiesioginės informacijos linija išlieka neišsami arba dviprasmiška.
Uždara valdymo sistema ir kontakto intelektas
Vienas aiškiausių taktilinio jutimo indėlių automatizacijoje yra uždaroji valdymo sistema. Kai tik jėgos ir kontakto informacija yra prieinama realiu laiku, robotai gali reguliuoti standumą, greitį ir trajektoriją pagal užduoties būseną. Tai palaiko atitikimo reguliavimą, susidūrimų aptikimą ir adaptacinį manipuliavimą. Platesnis poveikis yra tas, kad taktilinis jutimas perkelia robotą iš išankstinio programavimo vykdytojo link fiziškai reaguojančio sistemos.
Atviro išdėstymo modelyje ryškus bruožas yra tas, kad dauguma kontakto nesėkmių kyla ne dėl nepakankamos roboto jėgos ar prasto geometrinio planavimo, bet dėl vietinės atsiliepimų trūkumo. Griebtuvas gali taikyti netinkamą jėgą ne todėl, kad valdiklis neturi galimybių, bet todėl, kad jam trūksta patikimos trinties pokyčių, dalies netikslumo ar paviršiaus deformacijos indikacijos. Tokiose situacijose net nedidelis taktilinis sluoksnis gali gerokai pagerinti našumą, palyginti su stipresniu veikikliu. Tai rodo, kad protingesnis kontakto valdymas dažnai prasideda nuo geresnio jutimo, prieš apsvarstant agresyvesnę mechaniką.
Saugumas ir žmogaus-roboto sąveika
Bendradarbiaujant gamyboje, taktilinis jutimas taip pat pagerina saugumą. Robotai, kurie greitai aptinka netikėtą kontaktą, yra geriau pasiruošę apriboti smūgio jėgą, sustabdyti judesį arba perjungti į prisitaikantį elgesį. Tai tampa ypač svarbu bendrose darbo erdvėse, kur operatoriai ir mašinos dirba artimu atstumu. Saugumas šioje aplinkoje apima ne tik avarinius sustojimus. Tai taip pat apima netelkiamas grėsmes, mažų susidūrimų ribojimą ir sklandesnę bendradarbiavimą perdavimo arba asistuojančio surinkimo metu.
Iš inžinerinės perspektyvos sunkumas slypi pusiausvyros tarp jautrumo ir patikimumo. Jutikliai turi aptikti prasmingą kontaktą, neįjungdami nuolatinių klaidingų signalų dėl vibracijos, įrankių vibracijos ar normalaus proceso variacijos. Tikroje gamybos linijoje pernelyg jautrios sistemos gali tapti erzina nepatogumai, nes jos nutraukia darbo srautą ir sumažina operatoriaus pasitikėjimą. Būtent todėl efektyvūs pramoniniai taktiliniai sistemos paprastai derina slenksčio logiką, filtravimą ir užduočiai specifinę interpretaciją, o ne remiasi vien tik žaliuoju jutiklio išėjimu.
Skalabilumas ir griežti aplinkos apribojimai
Pramoninės aplinkos kelia griežtus reikalavimus ilgaamžiškumui, kalibravimo stabilumui ir priežiūros kaštams.
• Dulkės
• Alyva
• Temperatūros svyravimai
• Pakartotiniai smūgiai
• Elektromagnetinis triukšmas
Šie veiksniai gali palaipsniui arba staiga pabloginti jutiklių veikimą. Jutiklis, kuris gerai veikia švarioje mokslinių tyrimų platformoje, gali turėti sunkumų didelio ciklo gamybos ląstelėje. Dėl šios priežasties pramoninė plėtra priklauso ne tik nuo jutiklių galimybių, bet ir nuo pakavimo, sandarinimo, keičiamumo ir diagnostinio skaidrumo.
Mastelio didinimas kelia kitą iššūkį. Aukštos raiškos taktilinis tinklas gali pateikti puikius duomenis, tačiau jo praktinė nauda mažėja, jei priežiūra yra brangi arba integracija su esamais valdikliais tampa varginančia. Daugelyje įmonių pageidaujamas sprendimas nėra tas, kuris turi turtingiausią duomenų išvestį, bet tas, kuris toliau veikia su minimaliu pakartotiniu kalibravimu ir mažiau staigmenų. Patikimumas neidealiose sąlygose išlieka vienu iš įtikinamiausių inžinerijos brandos ženklų.
Taktiliniai jutikliai nešiojamuosiuose elektronikos prietaisuose
Nešiojamuose elektronikos prietaisuose taktiliniai jutikliai veikia kaip paskirstyti jutiklių sluoksniai, kurie stebi jėgą, temperatūrą, drėgmę, judėjimą ir kitus aplinkos ar fiziologinius signalus. Jų vaidmuo plečiasi nuo paprasto duomenų rinkimo iki nuolatinio sąveikos su kūnu, prietaisu ir aplinkine aplinka. Tai padėjo taktiliniams jutikliams tapti pagrindine elektroninės odos, išmaniųjų drabužių, reabilitacijos prietaisų ir sveikatos stebėjimo platformų sudedamąja dalimi.
Lankstių substratų ir tempimo grandinėlių plėtra ženkliai pagerino nešiojamųjų sistemų komfortą ir pritaikomumą. Daugeliui medžiagų klasių naudojamos dažnai, nes jos sujungia elektrinę funkcionalumą su mechaniniu prisitaikymu.
• Grafenas
• Anglies nanovamzdeliai
• Cinko oksidas
• Konduktoriai polimerai
• Skystieji metalai
Šios medžiagos leidžia jutikliams lenktis, tempėti ir prisitaikyti prie nelygių paviršių, išlaikant jautrumą ir signalo tęstinumą. Mechaninis pritaikomumas yra labai svarbus, nes nešiojamas prietaisas turi veikti nuolat deformuojamas, o ne stacionariomis, kruopščiai kontroliuojamomis laboratorijos sąlygomis.
Medžiagų inovacijos ir funkcijų plėtra
Medžiagų inovacijos išplėtė taktilinį jutiklį nuo vieno parametro aptikimo iki multimodalinės percepcijos. Modernūs nešiojami įrenginiai vis labiau siekia aptikti kelias signalų rūšis vienoje integruotoje platformoje.
• Slėgis
• Įtempimas
• Šiluma
• Drėgmė
• Biocheminiai pokyčiai
Tai leidžia turtingiau interpretuoti vartotojo būklę ir aplinką. Pavyzdžiui, tik slėgio duomenys gali rodyti kontaktą, tuo tarpu slėgis kartu su temperatūra ir drėgme gali padėti išskirti fizinį aktyvumą, stresą, aplinkos poveikį ar prastą sąsajos pritaikymą.
Tačiau multimodaliniai jutikliai taip pat įneša naujos sudėtingumo. Pridedant daugiau jutiklių kanalų, signalų perėjimas tampa rimta problema. Temperatūros pokytis gali keisti slėgio signalą, o mechaninis įtempimas gali trukdyti elektriniams keliams, skirtiems drėgmės aptikimui. Tai reiškia, kad funkcijų pridėjimas automatiškai nepagerina dizaino. Daugeliu atvejų dizaino kokybė vertinama pagal tai, kaip švariai izoliuojamos, kalibruojamos ir sujungiamos skirtingos modalumai.
Sistemų integracija nešiojamuose platformose
Dabartinis nešiojamų prietaisų dizainas vis labiau orientuojasi į pilnos sistemos integraciją. Jutikliai dabar sujungti su papildomomis funkcinėmis dalimis.
• Energijos moduliai
• Bevielio ryšio vienetai
• Signalų apdorojimo grandinės
• Mikroaktoriai haptiniam išėjimui arba terapiniam atsakui
Šis pokytis atspindi praktinę tiesą: vienas jutiklis nesudaro nešiojamo prietaiso, kurį žmonės norėtų naudoti. Tikrasis vertė atsiranda tik tada, kai jutikliai, skaičiavimai, perdavimas ir atsakas veikia kaip viena koordinuota platforma.
Faktiniame naudojime integracijos problemos dažnai išryškėja anksčiau nei jutiklių ribos. Įrenginys gali parodyti puikų jautrumą, tačiau vis tiek gali tapti nepatogus dėl akumuliatoriaus dydžio, nestabilaus bevielio perdavimo, odos dirginimo ar signalo praradimo judėjimo metu. Dėl šios priežasties įtikimiausi nešiojami dizainai dažnai demonstruoja santūrumą. Jie siekia subalansuoto našumo, mažos galios veikimo ir mechaninio komforto, o ne siekia izoliuotų piko matavimų. Įrenginys, kurį žmonės iš tikrųjų noriai nešios kiekvieną dieną, dažnai lenkia technologiškai pranašesnį, kuris galiausiai pamirštamas stalčiuje.
Patvarumo ir ilgalaikio naudojimo iššūkiai
Pakartotinis lenkimas, sukimas, prakaitavimas ir temperatūros pokyčių poveikis sukuria kumuliacinį stresą nešiojamuose sistemose. Medžiagų nuovargis gali sukelti keletą degradacijos kelių.
• Mikroįtrūkimai
• Skilimas
• Konduktyvumo praradimas
• Kalibravimo nuokrypis
Be to, šiluminių, mechaninių ir elektrinių savybių neatitikimai tarp sluoksniuotų medžiagų gali sukelti ilgalaikį nestabilumą. Šie gedimų modai yra ypač sunkūs, nes jie gali likti paslėpti trumpų testavimo ciklų metu, tačiau jie dažnai lemia tikrąjį produkto ilgaamžiškumą.
Todėl ilgalaikis našumas turėtų būti laikomas ankstyvu dizaino tikslu, o ne vėlyvojo etapo patikrinimo elementu. Įrenginiai, skirti kasdieniam naudojimui, reikalauja daugiau nei tik žadančios pradinės jautrumo savybės. Jie naudinga pagreitintus nuovargio testus, sukibimo vertinimą, kapsuliavimo strategijas ir dreifavimo kompensavimo algoritmus. Praktikoje ilgaamžiškumas dažnai skiria patrauklų prototipą nuo produkto, kuris gali veikti su mažiau kompromisų.
Kryžminiai iššūkiai ir ateities kryptys
Nors protezai, automatizacija ir nešiojamosios technologijos skiriasi taikymo tikslai, jie turi keletą bendrųjų iššūkių.
• Signalų ištikimybės gerinimas
• Triukšmo ir kryžminio kalbėjimo mažinimas
• Mechaninio ilgaamžiškumo didinimas
• Energijos vartojimo mažinimas
• Griežtesnio integravimo tarp jutiklių ir sprendimų priėmimo siekimas
Visose trijose srityse sritis juda link platformų, kurios yra mažesnės, protingesnės, minkštesnės ir labiau autonomiškos.
Vienas pastebimas tendencijas yra perėjimas nuo pasyvaus jutiklio prie aktyvaus suvokimo. Ateities taktilinės sistemos ne tik registruos slėgį. Jos interpretuos kontekstą, numatys sąveikos rezultatus ir realiuoju laiku prisitaikys elgesį. Tai gali apimti kelias naujas galimybes.
• Vietinis krašto kompiuterija
• Savikaliavimas
• Energijos surinkimas
• Įvykių valdymo komunikacija
Didžiausią įtaką turinčios pažangos greičiausiai ateis iš architektūrų, kurios sutrumpina atstumą tarp jutiklių, apdorojimo ir reakcijos.
Kita pagrindinė kryptis yra savarankiška veikla. Kadangi taktiliniai įrenginiai tampa labiau paskirstyti ir mobili, priklausomybė nuo dažnai krovimo ar didelių energijos šaltinių tampa vis rimtesniu apribojimu. Energiją taupančios elektronikos, lanksčios saugyklos, triboelektrinis energijos surinkimas ir žemos energijos neuromorfiniai grandynai greičiausiai turės didesnį vaidmenį. Taktilinė platforma tampa daug praktinę, kai ji gali išlikti patikima, nereikalaujanti nuolatinio vartotojo dėmesio.
Kitas didelis proveržis greičiausiai neateis iš tik jautrumo, nes daugelis jutiklių jau siūlo pakankamai jautrumo kontroliuojamoms demonstracijoms. Reikšmingesnis posūkis įvyks, kai taktilinės sistemos sujungs aukštos kokybės jutiklius su ilgaamžiškumu, interpretavimu ir sklandžiu integravimu į kasdienes užduotis. Sritis artėja prie etapo, kai sėkmė bus vertinama mažiau pagal tai, ar galima pamatuoti prisilietimą, ir daugiau pagal tai, ar tas prisilietimas gali būti naudojamas natūraliai, nuolat ir dideliu mastu.
Išvada
Taktiliniai jutikliai sujungia fizinio kontakto ir mašinos intelekto spragą, konvertuodami prisilietimo susijusias sąveikas į prasmingą informaciją. Veiksmingas taktilinis jutiklis priklauso ne tik nuo jautrumo, bet ir nuo signalo stabilumo, kalibravimo ir patikimos interpretacijos realiomis eksploatavimo sąlygomis. Kadangi robotika, automatizacija ir protingos sistemos toliau tobulėja, taktiliniai jutikliai liks būtini, kad pagerintų objekto valdymą, aplinkos suvokimą ir saugų žmogaus ir mašinos sąveiką.
Dažnai užduodami klausimai [FAQ]
1. Kodėl taktilinė atpažinimas dažnai yra sunkesnis nei taktilinė detekcija robotinėse sistemose?
Taktilinė detekcija yra orientuota į fizinio kontakto informacijos, tokios kaip jėga, slėgis, vieta arba slydimas, matavimą. Atpažinimas yra sudėtingesnis, nes jis turi interpretuoti tuos matavimus, kad nustatytų objekto savybes, formą, kietumą ar sukibimo būklę. Atpažinimo tikslumas priklauso nuo detekcijos duomenų kokybės, todėl jis yra jautresnis triukšmui, dreifui ir besikeičiančioms kontakto sąlygoms.
2. Kodėl taktilinių jutiklių plėtra persikėlė iš aparatūros tobulinimo į signalo apdorojimą ir suvokimo algoritmus?
Kai jutiklių technologija brendo, tyrėjai suprato, kad žali taktiliniai signalai vieni suteikia ribotą vertę. Naudingos informacijos atsiranda tik po kalibravimo, filtravimo, bruožų išgavimo ir interpretavimo. Šis perėjimas atvedė prie didesnio dėmesio duomenų apdorojimui, leidžiančiam robotams identifikuoti paviršius, aptikti slydimą, įvertinti objekto savybes ir priimti protingus valdymo sprendimus, o ne tiesiog matuoti jėgą.
3. Kaip slydimo jutikliai pagerina robotų sugriebimo našumą palyginus su tik jėgos jutikliais?
Jėgos jutikliai gali matuoti, kiek jėgos taikoma objektui, tačiau jie ne visada rodo, ar objektas pradeda judėti. Slydimo jutikliai aptinka santykinį judėjimą kontaktinėje paviršiuje ir gali identifikuoti mikro-slydimą prieš numetus objektą. Ši ankstyva įspėjimo sistema leidžia valdymo sistemai realiu laiku koreguoti sukibimo jėgą ir išlaikyti stabilų suėmimą.
4. Kodėl nėra vienintelės taktilinės jutiklių technologijos, kuri veiktų geriausiai kiekvienai paraiškai?
Kiekviena jutiklių metodika turi skirtingus kompromisus. Piezoresistiniai jutikliai yra ekonomiški ir lengvai integruojami, kapasityviniai jutikliai siūlo aukštą jautrumą, optiniai jutikliai pateikia išsamią erdvinę informaciją, piézoelektriniai jutikliai puikiai aptinka dinamiką, o magnetiniai jutikliai palaiko daugiašalį jautrumą. Geriausias pasirinkimas priklauso nuo tokių veiksnių kaip jautrumo reikalavimai, aplinkos sąlygos, patvarumas, kaina ir sistemos integracijos poreikiai.
5. Kokie veiksniai lemia ateities taktilinių jutiklių technologijos plėtrą?
Ateities taktilinės sistemos tikimasi, kad sutelks dėmesį į daugiašalį jautrumą, didesnės raiškos jutiklių sąrašus, glaudesnę integraciją su valdymo sistemomis ir protingesnį signalų interpretavimą. Atsirandančios plėtros, tokios kaip krašto kompiuterija, savaiminis kalibravimas, energijos surinkimas ir neuromorfinis apdorojimas, siekia sukurti taktilines platformas, galinčias veikti patikimiau, efektyviau ir autonomiškiau realiame pasaulyje.
Susijęs tinklaraštis
-
„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“
![„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“]()
2024/08/28
„IRLZ44N“ yra plačiai naudojamas N-kanalo galios MOSFET.Garsusi dėl puikių perjungimo galimybių, jis labai tinka daugybei programų, ypač galio... -
Kiek nulių per milijoną, milijardus, trilijonus?
![Kiek nulių per milijoną, milijardus, trilijonus?]()
2024/07/29
Milijonas reiškia 106, lengvai sugriebtas skaičius, palyginti su kasdieniais daiktais ar metiniais atlyginimais. Milijardas, lygi 109, pradeda tempt... -
Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?
![Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?]()
2024/10/6
Mobiliojo telefono akumuliatoriaus įkrovimo problemos yra įprastos, tačiau juos galima efektyviai valdyti.Temperatūra vaidina didelę įtaką akum... -
BC547 TRANSISTORAS KLAUSIMAS VADOVAS
![BC547 TRANSISTORAS KLAUSIMAS VADOVAS]()
2024/07/4
BC547 tranzistorius dažniausiai naudojamas įvairiose elektroninėse programose, pradedant nuo pagrindinių signalo stiprintuvų iki sudėtingų osci... -
Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose
![Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose]()
2025/09/20
Multiplekseriai yra komponentai skaitmeninėse sistemose, skirtos nukreipti kelis įvesties signalus į vieną išvesties liniją, naudojant dvejetain... -
Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)
![Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)]()
2024/04/22
Silicio valdomi lygintuvai (SCR) arba tiristoriai vaidina pagrindinį vaidmenį „Power Electronics“ technologijoje dėl jų našumo ir patikimumo.Š... -
CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti
![CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti]()
2025/09/15
Mygtukų baterijos, tokios kaip CR2450 ir CR2032, maitina daugybę kasdienių elektronikų, pradedant laikrodžiais ir nuotoliniais nuotoliniais mokes... -
LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai
![LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai]()
2024/07/15
LR621 ir SR621SW mygtukų baterijos yra paplitusios kompaktiškuose elektroniniuose įrenginiuose, tokiuose kaip laikrodžiai, maži žaislai, skaiči... -
OP-AMP grandinių pagrindai
![OP-AMP grandinių pagrindai]()
2023/12/28
Sudėtingame elektronikos pasaulyje kelionė į jos paslaptis visada veda mus į grandinės komponentų kaleidoskopą, tiek išskirtinį, tiek sudėti... -
Palyginus NMO ir PMOS skirtumus ir programas
![Palyginus NMO ir PMOS skirtumus ir programas]()
2024/11/15
Suprantant efektyvias grandines, svarbu suprasti NMOS ir PMOS tranzistorių skirtumus.NMOS (N-type Metal-Oxide-Semiconductor) and PMOS (P-type Metal-O...




Karštos dalys
- MBRA160T3G
- IDT82V2058XDAG
- FW323-06
- ISPLSI1016E-80LJN
- PW218C-10
- 1808CC102MAT1AJ
- S71JL128HB0BAW01
- 12103D106MAT2A
- GRM188R72A682KA01J
- ISL28230CUZ
- C3216X7R2J152M115AA
- HMHA2801R2
- LBB110STR
- C1608X8R1H223M080AA
- NRF24LE1F16Q32
- LM3S1958-IQC50-A2
- SCANPSC100FSCX
- T491C476K010ZT
- SST27SF512-70-3C-PGE
- AD22299-1ZA
- AD7819YRUZ
- U74HC164G
- ADE7868ACPZ
- 74AHCT164D
- XR16V654IJ-F
- T521D336M035ATE065
- XC3042-100TQ100C
- M50FW040K5TG
- ATXMEGA16A4U-CUR
- AD734ANZ
- C3216X7S3A102M085AA
- UMK107CK1R5CZ-T
- GRM1555C1E9R7DZ01D
- HCPL0611
- AP8802FNG-7
- DAC124S085CIMMX/NOPB
- EPM7512BFC256-10
- T491B105M035AT7280
- TPSM846C24MOLR
- T491D685M035ATZQ01
- T491C107M010ZT7280
- BSC15NE2SXT
- DM9013EP
- M30626MJP-A24GP
- PEB20550HV2.1
- KI01608AB-GA1
- SV8860-AAAVRF
- MAX31826MUA
- SST49LF008A-33-4CNHE
- T1200B-45BLI