- lietuvių
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
PMIC paaiškinta: funkcijos, tipai ir taikymas
Katalogas
PMIC tyrinėjimas
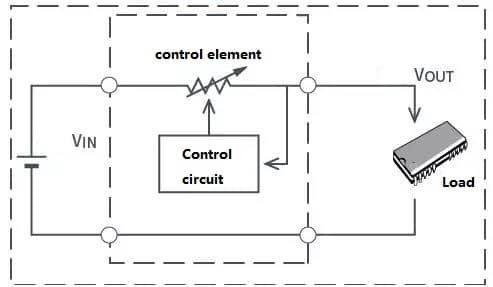
PMIC (energijos valdymo integruota grandinė) yra specializuotas IC, kuris priima vieną ar kelis energijos įėjimus ir gamina kelis reguliuojamus, kontroliuojamus energijos geležinkelius skirtingoms apkrovoms ant plokštės. Šios apkrovos dažnai apima procesorius, atmintį, RF sekcijas, jutiklius ir įvairius periferinius įrenginius.
Vietoj to, kad paskirstytų diskretinius reguliatorius ir priežiūros IC per dizainą, PMIC juos sujungia į vieną koordinuotą energijos domeno valdytoją. Daugeliui komandų šis sujungimas taip pat suteikia tam tikrą ramybę pradedant, nes yra viena vieta, kur ieškoti, kai geležinkeliai elgiasi keistai.
Procesoriai, atmintis, RF blokai, jutikliai ir kitos apkrovos.
Funkcijos apimtis
Realiuose produktuose PMIC indėlis gerokai viršija įtampos konversiją. Praktinis privalumas pasireiškia, kai jis veikia kaip sistemos lygio energijos koordinatorius, kuris sujungia keletą atsakomybių, kurios natūraliai sąveikauja paleidimo, veikimo apkrovų žingsniuose ir gedimų sąlygose.
Konversija
PMIC gali sujungti skirtingų reguliatorių tipus, kad energijos geležinkeliai, orientuoti į efektyvumą, ir triukšmo jautrūs energijos geležinkeliai galėtų būti optimizuoti atskirai. Praktiniuose dizainuose pagrindinis rūpestis dažnai yra ne generuoti reikiamą įtampą, bet išlaikyti stabilų įtampą apkrovos pokyčių, paleidimo įvykių ir kitų sudėtingų veikimo sąlygų metu.
Buck reguliatoriai, boost reguliatoriai, buck-boost reguliatoriai ir LDO reguliatoriai.
Geležinė, kuri atrodo švari esant pastoviai apkrovai, gali tapti matomai stresuota realių profilių metu. Efektyvumas, banga, pereinamasis atsakas ir šilumos rezervas dažnai kruopščiai nagrinėjami, kai CPU srauto srovės, RF perdavimo impulsai arba jutiklių mėginių ėmimo smailės yra išbandomi realiomis darbo sąlygomis.
CPU pliūpsniai, RF perdavimo impulsai ir jutiklių mėginių ėmimo smailės.
Paskirstymas
Po to, kai geležinkeliai sugeneruojami, PMIC dažnai nurodo, kaip jie yra dalijami, jungiamas ir izoliuojamas. Čia dizainas gali atrodyti arba tvirtas, arba trapus, ypač karšto įjungimo, brownout ir kabelių susijusių įvykių metu. Kai paskirstymas atliekamas apgalvotai, srovės šuolis yra kontroliuojamas, atgalinio maitinimo keliai yra ribojami, o gedimas mažiau tikėtina, kad pereis į plokštės lygio žlugimą.
Geležinkelio įjungimai, apkrovos jungikliai, srovės ribojimas ir idealiųjų diodų ORing su daugialypėmis įvestimis.
Aptikimas ir priežiūra
Dauguma PMIC integruoja priežiūros funkcijas, kurios nuolat stebi geležinkelio sveikatą ir teikia signalus, kuriuos programinė įranga ir aparatinė įranga gali interpretuoti. Laboratorijoje šios funkcijos greitai nustoja būti maloniomis papildomomis funkcijomis ir pradeda jaustis kaip skirtumas tarp švarios derinimo sesijos ir dienos, praleistos ieškant atkūrimo, kuris atsisako būti atkurtas pagal poreikį.
Įtampos žemiausios ribos monitoriai, įtampos aukščiausios ribos monitoriai, per didelės srovės aptikimas, termodinaminiai jutikliai ir energijos gerumo signalizavimas.
Viena pamoka, kuri linkusi išlikti patyrusių įrangos paleidimo komandų atmintyje, yra ta, kad energijos gerumo slenksčiai ir išvalymo laikas turi būti aiškūs. Kai jie yra neaiškūs arba prastai atitinka sistemą, rezultatas dažnai būna neteisingi perkrovimai arba „phantom“ paleidimo nesėkmės, kurios pasirodo tik temperatūros kampuose, kai kuriose baterijose arba po greitų perkrovimų sekos.
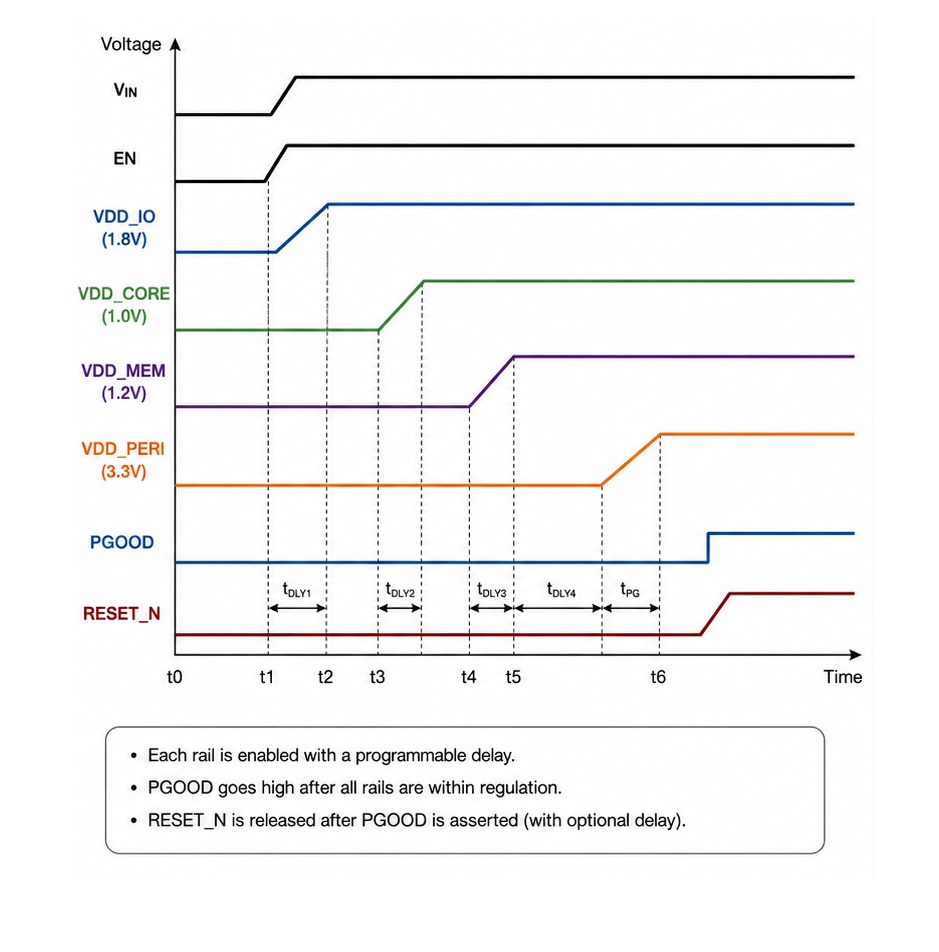
Valdymas ir sekos
PMIC dažnai apima mechanizmus, kurie formuoja, kaip bėgiai kyla, krenta ir biržai koordinuojasi tarpusavyje. Šie aspektai pasireiškia kaip konkretūs rezultatai: ar sistema paleidžiama nuosekliai, ar komponentai patiria išvengiamą stresą, ir ar plokštė po gedimo grįžta į žinomą būseną.
Sekos, minkštas paleidimas, nuolydžių formavimas, iškrovimo keliai ir konfigūruojamas tarp bėgių laikas.
Skaitmeniniai sistemai paprastai nereikia tik teisingų pastovių įtampų; ji taip pat tikisi, kad šie bėgiai pasirodys tam tikra tvarka ir per ribotus laiko santykius. Jei nuolydžiai yra per stati, per lėti arba tiesiog neteisingai išdėstyti, vidinės struktūros ir sritys gali patekti į nesureglamentuotas sąlygas, kurios yra varginančiai ar sporadiškai pasitaikančios, ypač aplink SRAM išlaikymo elgesį ir didelio greičio sąsajų paleidimą.
Vidinė ESD struktūra, SRAM išlaikymo sritys ir didelio greičio sąsajos.
Kas linkę formuoti rezultatus realiuose projektuose
Kai komanda pereina iš blokinio schemos į veikiantį prototipą, PMIC pasirinkimas ir konfigūracija dažnai priklauso nuo operacinių detalių, o ne nuo marketingo lygio specifikacijų. Subtilios problemos yra tos, kurios sukuria grafiko spaudimą, nes jos iškyla vėlai ir retai pasirodo kaip vienas, aiškus šaltinis.
Susidorojimas su greitais perėjimais ir dinaminiais apkrovimais
Šiuolaikiniai procesoriai ir RF skyriai gali reikalauti didelių srovės šuolių mikrosekundžių laikotarpiu. PMIC gali pasirodyti visiškai priimtina popieriuje ir vis dar rodyti įtemptus, per didelius šuolius arba signalų atsiliepimus, kai kontrolės kilpa, kompensavimo metodas, išėjimo tinklas ir PCB parazitiniai komponentai priversti sąveikauti realiame maketavime.
Įtempti, per dideli šuoliai ir signalų atsiliepimai.
Komandos, kurios anksti testuoja reakcingumą, dažnai tai daro, nes joms skaudėjo atrasti tai vėlai. Ankstyva validacija gali sumažinti nemalonaus perprojektavimo ciklo, apimančio induktorius, išėjimo kondensatorius, kompensavimo komponentus arba net patį PMIC pasirinkimą, tikimybę.
Induktoriai, kondensatoriai, kompensavimo komponentai ir pats PMIC.
Sekos kaip sistemos sutarties, o ne patogumo
Energijos sekos geriausiai veikia, kai ji vertinama kaip sutartis tarp silikono reikalavimų, programinės įrangos prielaidų ir plokštės elgesio. Kai nuolydžio greičiai ir energijos gerumo laikai nusirita nuo to, ko tikisi procesoriaus duomenų lapas, arba kiek programinė įranga implicitai prisiima, laikinuosius paleidimo problemos linkusios pasirodyti.
Procesoriaus duomenų lapo reikalavimai ir programinės įrangos lūkesčiai.
Kas daro šias problemas ypač varginančiomis, yra jų polinkis dingti draugiškos laboratorijos sąlygomis ir grįžti per temperatūros ekstremumus, baterijos karštuoju prijungimu ar marginaliomis tiekimo sąlygomis. Tokiose aplinkose deterministinė sekos ir prognozuojamas perkrovimo elgesys sumažina siurprizus ir sutrumpina derinimo ciklus.
Temperatūros kampai, baterijos karšto prijungimo įvykiai ir panašios sąlygos.
Apsaugos elgesys kaip laiko ir paslaugų išlaidų svertas
Per didelės srovės ribos, terminis išjungimas ir UV/OV apsaugos dažnai aptariamos saugos kalba, tačiau diegiamuose produktuose jos patiriamos kaip prieinamumo funkcijos. PMIC, kuris švelniai riboja srovę, praneša apie klaidas pakankamai aiškiai, kad būtų galima veikti, ir atsinaujina kontroliuojamu būdu, gali užkirsti kelią mažai periferinei nesėkmei virsti visa sistemos sutrikimo ir palaikymo užklausa.
Apsaugos mechanizmai: Per didelės srovės apsauga, terminis išjungimas, per mažos įtampos apsauga ir per didelės įtampos apsauga.
Sistemos patikimumo privalumai: Švelnus srovės ribojimas, klaidų pranešimas ir kontroliuojamas atsinaujinimas.
Dažnai tikslingiau, ir atvirai naudingiau kuriant dizaino kompromisus, mąstyti apie PMIC kaip dalį sistemos patikimumo architektūros, o ne kaip tik energijos keitiklį. Dizainai, kurie gerai sensta, linkę pasirinkti PMIC, remiasi tuo, kaip nuosekliai jis užtikrina prognozuojamus energijos būsenas per normalų veikimą, klaidų tvarkymą ir perėjimus.
Kai šis požiūris yra rimtai vertinamas, detalės, kurias lengva nuvertinti ankstyvoje planavimo stadijoje, pradeda kitaip perskaityti integracijos metu. Bėgių iškrovimo elgesys, energijos gerumo signalo vientisumas ir klaidų telemetrija tampa savybėmis, kurios skiria prietaisą, kuris tik įsijungia laboratorijoje, nuo prietaiso, kuris paleidžia sklandžiai, nuosekliai ir prognozuojamai lauke, be inžinerijos komandos būdamo sėkminga.
PMIC kategorijos
PMIC'ai dažnai žymimi pagal pagrindinę funkciją, tačiau laivų aparatinė įranga linkusi elgtis kaip kompaktiška, koordinuota energijos subsistema, o ne kaip vieno tikslo komponentas. Praktinis būdas sugrupuoti PMIC tipus yra stebėti (a) ką jie reguliuoja, (b) ką jie riboja ar užtikrina, ir (c) ką jie jungia, atjungia ar aktyviai valdo. Iš sistemos paleidimo perspektyvos, skiriamoji linija, kuri nuolat iškyla, labiau susijusi su PMIC gebėjimu valdyti juostos tarpusavio sąveiką keičiantis apkrovai. Kai ta sąveika yra apgalvotai sprendžiama, plokštės jaučiasi ramesnės streso testų metu; kai to nepadaroma, tas pats dizainas gali atrodyti gerai ant stalo maitinimo šaltinio, tačiau tapti kaprizingu visiškai surinktoje produkcijoje.
Pagrindinės funkcinių grupių
Šios blokai generuoja įtampas, nustato darbo taškus ir sugeria pokyčius įvesties sąlygose. Jie paprastai apima viską nuo mažos srovės tylos įtampų iki didelės srovės skaitmeninių sričių.
• Linijinis reguliavimas (LDO)
• Keitimo reguliavimas (buck, boost, buck-boost, invertuojantis, įkrovimo siurbliai)
• Priešinis konversijos ir paruošimo reguliavimas (AC/DC adapteriai, USB-PD imtuvo etapai, automobilių išankstiniai reguliatoriai kai kuriose platformose)
Šie blokai formuoja, kaip energija gali elgtis, apibrėždami slenkstines vertes, stebėdami ribas ir reaguodami į klaidas. Jie gali nesuteikti vatų, tačiau dažnai nusprendžia, ar sistema žlugs sklandžiai, ar žlugs paslaptingai.
• Įtampos nuorodos ir juostos skirtumai
• Prižiūrėtojai, monitoriai ir langų lygintuvai
• Iš naujo nustatymo generavimas, stebėjimo laikmačiai ir energijos nuostolių aptikimas
• Sekvencijavimas, sekimas ir klaidų atsakas (UV/OV, didelės srovės, šiluminis atsakas)
Šie blokai nustato, kur energija teka, kada ji yra izoliuota ir kaip išoriniai apkrovai yra valdoma. Realiose sistemose jie dažnai yra vieta, kur pirmiausia iškyla kraštinės situacijos, karšto prijungimo, kabelių kritimo, priedų klaidos.
• Energetikos valdymas
• Apkrovos jungikliai ir eFuses
• Baterijų įkrovimas
• Ekrano susijusios įtampos ir valdikliai
• MOSFET vartų valdikliai
Regulavimo / konversijos tipai
LDO dažnai pasirenkami, kai pageidaujama mažo išėjimo triukšmo, paprasto dizaino proceso ir greito mažos signalizacijos elgesio. Jie dažnai pasirodo radijo dažnio blokų, garso įtampų, tikslumo jutiklių ir ADC nuorodų susijusiose maitinimo šaltiniuose, kur bangos pulsai gali virsti matomu našumo nuostoliu.
Šiluma dažnai yra ribojantis faktorius reguliatorių veikimui. Didėjant įėjimo ir išėjimo įtampos skirtumui arba didėjant apkrovos srovei, energijos išsiskyrimas ir temperatūra gali tapti svarbesni už elektrines tikslumo specifikacijas.
Energetikos bėgis, kuris atrodo stabilus atviroje stalviršio testavimo metu, gali sukelti reikšmingų šilumos problemų uždarytose sistemose ar aukštos temperatūros aplinkose, kur oro srautas ir šiluminiai rezervai yra sumažinti.
Buck keitikliai neša didžiąją dalį darbo, kad būtų efektyvios centrinių maitinimo šaltinių: taikomosios procesoriai, DSP, DDR įtampos ir kitos didelės srovės skaitmeninės sritys. Praktikoje dvi plokštės, naudojančios tą patį buck, gali elgtis labai skirtingai priklausomai nuo valdymo režimo, veikimo režimo esant mažai apkrovai ir išdėstymo nulemtų parazitų.
• Valdymo požiūris (įtampos režimas, srovės režimas, hysteretic, pastovus laikas)
• Mažos apkrovos elgesys (PFM, impulso praleidimas, priverstinis PWM)
• Laikinoji reakcija prieš išėjimo bangos pulsuojančius kompromisus
• EMI požiūris (skleidimo spektro galimybės, keitimo dažnio pasirinkimai, išdėstymo jautrumas)
Detalė, kuri linkusi aštrinti dizaino apžvalgas, yra apkrovos profilio realybė. Keitiklis, kuris atrodo puikiai esant 2 A, gali išleisti didžiąją savo gyvenimo dalį 20–200 mA, kur būsenos perėjimai, vartų įkrovimo nuostoliai ir keitimo perėjimai dominuoja. Palyginti tik viršutinės efektyvumo vertes gali sukelti realaus veikimo akumuliatoriaus tarnavimo laiką, kuris yra blogesnis nei tikėtasi pagal pirminius įvertinimus.
Boost keitikliai paprastai naudojami, kai tikslinė įtampa turi viršyti šaltinį; įprasti pavyzdžiai apima 5 V generavimą iš vienos ląstelės baterijos, ekranų polarizavimo įtampos kūrimą arba LED juostelių maitinimą. Buck-boost topologijos yra pageidaujamos, kai įėjimas gali kirsti tiek virš, tiek žemiau norimo išėjimo, pavyzdžiui, išlaikant stabilų sistemos bėgį per visą baterijos iškrovimo kreivę.
Šie keitikliai dažnai išsprendžia sistemos lygio galvos skausmus, pavyzdžiui, išlaikydami 5 V sritį stabilia, kol baterija silpnėja; tačiau ta pagalba ateina su daugiau judančių dalių: kompensacijos sudėtingumo, jungiklio srovės ribojimo elgesiu ir perduodamu EMI, kuris gali būti netikėtai jautrus plokštės geometrijai ir kabelių sąlygoms.
Telefonuose ir mažuose IoT moduliuose AC/DC blokas paprastai būna už produkto ribų, tačiau priekinis derybų ir įvesties apsaugos funkcijos vis labiau patenka į prietaisą. Net kai duomenų lapas reklamuoja juos kaip USB funkcijas, o ne PMIC funkcijas, jos stipriai formuoja žemyn konverterių dydį, šilumos pasiskirstymą ir blogiausio atvejo stresą.
• USB-PD aptikimo ir derybų palaikymas
• Įveskite srovės ribojimą ir įsijungimo kontrolę
• Per didelės įtampos apsauga USB priedams ir adapteriams
Tikslios palaikymo blokeliai
Nuorodų ankerio tikslumas ADC, DAC ir palyginimo slenksčiams. Mišrių signalų produktuose nuolat svarbūs aspektai yra dreifavimo elgesys, triukšmo tankis ir PSRR atitinkamame dažnių diapazone. Tai gali pasirodyti nelogiška, tačiau nedidelis kiekis nuorodinio triukšmo gali pasireikšti kaip matuojamas drebėjimas, jutiklio klaida arba slenkstinės neaiškios, kai jis padidinamas realaus pasaulio pelnu ir filtravimo pasirinkimais.
Stebėtojai stebi bėgius, kad aptiktų per mažą įtampą, per didelę įtampą ir sekos pažeidimus. Daugialypėse sistemose jie padeda išvengti pusiau gyvų būsenų, kai vienas domenas kyla ir pradeda vykdyti, o kitas yra vėlai, susilpnėjęs arba svyruojantis.
Iš patikimumo perspektyvos tvirta stebėsena dažnai sumažina tas retkarčiais pasitaikančias lauko grąžinimo problemas, kurios visiems kelia nepasitenkinimą: problemos, kurios kyla tik šaltų paleidimų, mažos talpos paleidimų, greitų karštųjų prijungimų arba ribinių kabelių atveju, kurie niekada nebuvo „laimingame kelyje“ laboratorijoje.
Sekos valdymas yra daugiau nei geležies A, tada geležies B. Tai tampa diskusija apie laiko tolerancijos krūvas, įkalnės šlaitus, atstatymo santykius ir ką sistema daro, kai bėgis praleidžia savo langą.
SoC dokumentacija dažnai nurodo IO-prieš-kodą priklausomybes, atminties mokymo apribojimus ir tikslų atstatymo laiko negaliojimo momentą. PMIC su programinėmis sekomis ir kontroliuojamais šlaitais gali sumažinti išorinius kliju logiką ir padaryti paleidimą mažiau kasimo procesu, ypač kai plokštės greitai iteruoja ir mažos laiko pokyčiai gali sutaupyti dienas derinimo.
Energijos kelias ir vairavimo funkcijos
Energijos kelio logika nusprendžia, ar sistema veikia iš USB, baterijos, ar abiejų mišinio ir tai veikia tolesnius perėjimus.
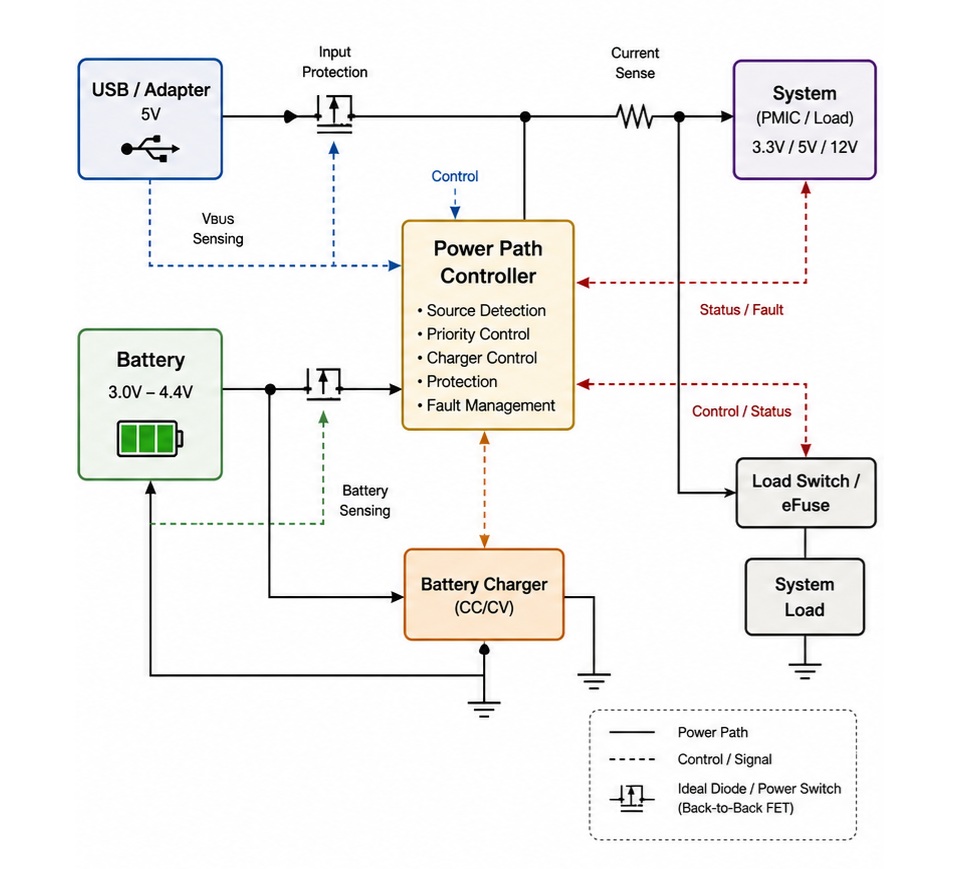
• Sklandus perjungimo elgesys (ribojant kritimus, kurie sukelia atstatymus)
• Įveskite srovės ribojimą, kad atitiktumėte USB/adapters ir reikalavimus
• Idealiojo diodo elgesys, kad sumažintų atbulinę srovę
Pasikartojanti realaus pasaulio spąstai yra pasitikėjimas atsparumu kabeliuose, jungtyse ir apsaugos elementuose. Greito trumpojo jungimo metu PMIC gali elgtis tiksliai taip, kaip numatyta, o sistema vis tiek gali patirti maitinimo sumažėjimą, nes pradinis kelias nusileidžia daugiau nei modelis numatė. Tokie gedimai atrodo „neteisingi“, kol visas kelio impedansas nematuojamas ir nelaikomas dizaino dalimi, o ne pastabos dalimi.
Įkrovikliai skiriasi baterijų chemijos palaikymu, grandinės topologija, terminėmis charakteristikomis ir dizaino tikslais. Dažniausi prioritetai apima greitesnį įkrovimą, žemesnę paviršiaus temperatūrą, sumažintą EMI arba sistemos našumo išlaikymą, kol įkraunama.
• Linijiniai įkrovikliai
• Jungikliniai įkrovikliai
• Energijos banko/OTG režimai
Pasirinkimas dažnai grindžiamas terminio biudžeto, reguliavimo arba tarpusavio suderinamumo apribojimais ir tuo, ar tikimasi, kad prietaisas išlaikys visą našumą, kol įkraunamas, nesijaučiančius lėtai arba veikiant nepatogiai šiltai.
Krovinio jungikliai dažnai naudojami, kad būtų ribojami bėgiai budrumo energijos sumažinimui ir izoliacijos sritys per klaidą arba siuntimo būsenas. eFuses prideda programuojamus srovės ribojimus, klaidų laikmačius ir kontroliuojamą įjungimo elgesį.
Daugelyje produktų šie blokai atgauna savo plokštės plotą, paversdami netvarkingus gedimo režimus, jungčių trumpas, priedų klaidas, neteisingo prijungimo įvykius į apribotas situacijas, o ne į kaskadinius atkūrimus ar fizinę žalos, kurią brangu diagnozuoti ir dar sunkiau reprodukuoti.
Ekrano sistemoms dažnai reikia kelių energijos bėgių, tokių kaip AVDD, VGH ir VGL, su kruopščiai kontroliuojamu paleidimo sekos tvarka, kad būtų išvengta matomų ekrano artefaktų. LED vairuotojai taip pat turi tiksliai reguliuoti srovę ir patikimai reaguoti į atvirų laidų ir trumpojo jungimo gedimus, nes šios būklės dažnai pasitaiko veikimo metu.
Vartų vairuotojai ir aukštesnės galios etapai tampa vis svarbesni robotikoje, automobilių ir pramoninėje įrangoje, kur variklio valdymas ir didesnės įtampos konversija susikerta su PMIC stiliaus koordinavimu, telemetrija ir apsaugos politikomis.
Tipinis „Telefonas/IoT PMIC“
Daugelyje telefonų ir kompaktiškų IoT modulių PMIC geriausiai suprantamas kaip apgalvotas blokų derinys, o ne kaip viena kategorija. Integracija dažniausiai skirta PCB ploto sumažinimui, sekos supaprastinimui ir suteikimo programinei įrangai vieną vietą stebėti ir daryti įtaką energijos elgesiui.
• Kelios didelio efektyvumo buck konverteriai CPU, GPU, atminties ir visada įjungtų bėgių
• Vienas ar daugiau LDO mažo triukšmo analoginėms ir RF bėgiams
• Įkroviklio ir energijos kelio grandinė USB ir baterijos koordinavimui
• Monitoriai, sekvenatoriai, terminiai valdikliai ir nutraukimo pranešimai telemetrijai ir klaidų valdymui
Be rezultatus dažniausiai lemia bėgių sąveika. Buck transient gali susijungti su RF LDO per bendrą žemę impedansą. Įkroviklio temperatūros mažinimas gali tyliai sumažinti prieinamą sistemos srovę, o ta kaita gali nusistatyti pagrindinį bėgį slidime darbo krūvio augimo metu. Dizainai, kurie vertina kiekvieną bloką izoliacijoje, dažnai atrodo tvarkingai ankstyvuose laboratoriniuose testuose ir tada tampa sudėtingi integruoto streso testavimo metu, kai viskas keičiasi, įkaista ir derasi vienu metu.
Pasirinkimas ir integracija
Perjungimo reguliatoriai paprastai pasirenkami siekiant sumažinti nuostolius, tačiau jie gali įvesti bangavimą ir EMI, kurie paplinta į jautrias sritis. LDO dažnai ramina triukšmą, tačiau kaina atsiranda kaip šiluma, kai įtampos rezervo yra daug arba srovė nėra nereikšminga.
• Perjungimo reguliatoriai: didesnis efektyvumas, daugiau bangavimo/EMI valdymo darbo
• LDO: mažesnis triukšmas, didesni šilumos nuostoliai sumažinus įtampą
Kompromisas, kuris dažnai veikia gerai, yra naudoti buck, kad sukurtumėte tarpinius bėgius, tada naudoti LDO galutiniam jautriam bėgiui, tik jei rezervo ir šilumos elgsena buvo numatyta apgalvotai, o ne palikta po kitų sprendimų.
Greiti apkrovos pokyčiai reikalauja greitų valdymo kilpų, teisingo kompensavimo dizaino ir pakankamo išėjimo talpos, kad būtų užtikrinta stabili reguliacija pirmaisiais mikrosekundėmis. Kondensatorių pasirinkimas apima daugiau nei tiesiog talpos didinimą. Efektyvi talpa gali sumažėti dėl DC nuolatinės įtampos, temperatūros pokyčių ir senėjimo. ESR ir ESL taip pat daro įtaką grandinės stabilumui, laikiniems atsakams ir EMI veikimui, todėl jie yra svarbūs dizaino svarstymai.
Komandos, kurios patvirtina su tiksliai ta pačia kondensatoriaus dielektriku, įtampos reitingu ir korpuso dydžiu, skirtais gamybai, linkusios išvengti vėlyvų stabilumo netikėtumų, ypač kai tiekimo grandinės priverčia naudoti ekvivalentinius pakaitalus, kurie yra tik popieriuje ekvivalentiniai.
PMIC elgesį esant gedimui galima sukurti remiantis skirtingomis filosofijomis. Vienas požiūris bando užtikrinti gražų nuosmukį, valdyti šviesos išjungimą, riboti procesoriaus užimtumą, selektyvų bėgių išjungimą, kad sistema liktų naudojama sumažintoje būsenoje. Kitas požiūris numato deterministinį išjungimą, kad greitai pasiektų žinomą saugią būseną.
• Gražus nuosmukis: dažnai suderinamas su vartotojo patirties tikslais vartotojiškuose produktuose
• Deterministinis išjungimas: dažnai suderinamas su prognozuojamu elgesiu saugos srityje
Geriausiai tinkantis PMIC paprastai yra tas, kurio sekimo ir gedimų atsakymai atitinka produkto numatytą elgesį, o ne tas, kuris reklamuoja ilgiausią kontrolinį sąrašą.
Didėjantys perjungimo dažniai ir plačios juostos energijos etapai didina pasiekiamą energijos tankį, tačiau jie taip pat sukelia griežtesnius PCB išdėstymo reikalavimus ir didesnį EMI jautrumą. Tuo pačiu metu programinės įrangos funkcijos, tokios kaip telemetrija, nutraukimai, žurnalo funkcijos ir programuojamos valdymo politikos, tampa svarbiais veiksniais bendrajame energijos sistemos valdyme ir integracijoje.
PMIC, kurie išlaiko prognozuojamą energijos elgesį realiuose darbo krūviuose, gali labai sumažinti derinimo laiką, ypač sistemose, kurios valdo radijo signalus, procesorius, įkrovimo operacijas ir šilumos ribas vienu metu.
PMIC taikymo sritis
PMIC pasirodo bet kur, kur reikia konvertuoti, platinti, sekti, stebėti ir saugoti elektrinę energiją, tuo pačiu laikantis nuostolių ir trikdžių kontrolės. Jie reguliariai naudojami vartotojiškuose, verslo, automobilių ir pramoniniuose projektuose, tačiau skiriamoji linija paprastai nėra galutinė rinka, o tai, kaip energijos medžiai atrodo praktikoje. Tuo momentu, kai produktas turi kelis bėgius su skirtingu triukšmo toleravimu, skirtinga žingsnio apkrovos elgsena ir skirtingais gedimo lūkesčiais, PMIC nustoja būti "komponento pasirinkimu" ir pradeda veikti kaip formuojanti jėga sistemos elgesyje. Daugelyje realių projektų, kai galingas procesorius sujungiama su radijo signalais, jutikliais, atmintimi ir didelio greičio I/O, energijos architektūra galiausiai riboja tai, ką platforma gali nuosekliai pateikti, net kai skaičiavimo ir programinė įranga atrodo tvirta ant popieriaus.
Kur PMIC elgesys apriboja realaus pasaulio sistemos rezultatus
Apkrovos laiko pokyčių atsakas, kuris tyliai nustato lubas
Šiuolaikiniai CPU ir GPU per didinimo ir sprogimo veiksmus ima staigius srovės šuolius, o tie šuoliai gali būti nepaprastai negailestingi. Kai PMIC valdymo kilpa, išėjimo talpa ir paskirstymo impedansas negali išlaikyti bėgio viduje griežtų ribų, programinės įrangos komandos dažnai reaguoja subtiliai, bet brangiai: jos trumpina didinimo langus, trumpina pikų laikrodžius arba įterpia platesnius apsaugos juostų, kad avarijos nepasireikštų srityje. Inžineriniu požiūriu, tas mainas gali jaustis nusivylimąs, nes platforma gali atrodyti efektyvi, vis tiek palikdama našumą ant stalo realiame eisme.
Komandos, kurios tik patvirtina su statiniais apkrovimais arba tvarkingais laboratoriniais modeliais, dažniausiai tai sužino vėlai. Tikros apkrovos sukuria nelygius kraštus: trumpi žaidimų protrūkiai, AI išvedimo pikai ir radijo šaliai egzistavimo įvykiai gali sukelti įtampų kritimus, kurie niekada neatsirado, kai geležinkelis buvo apkrautas su palankiu stendo profiliu. Nepatogi pamoka yra ta, kad pakartojama trumpalaikė elgsena esant netvarkingoms apkrovoms dažnai suteikia daugiau panaudojamos našumo nei siekti patrauklaus efektyvumo skaičiaus viename veikimo taške.
Bangavimo ir plačiajuosčio triukšmo, kuris virsta signalo vientisumo įsiskolinimu
Bangavimo neturėtų vertinti tik kaip analoginės veiklos parametro. Perjungimo harmonikos ir plačiajuostis triukšmas gali paveikti ADC rezoliuciją, padidinti RF fazės triukšmą ir sumažinti SERDES signalo margą, ypač kai energijos geležinkeliai dalijasi grąžinimo keliais ar susijungia per paketo ir PCB induktyvumą. Energijos geležinkelis, kuris atrodo švarus vieno geležinkelio testavime, gali elgtis labai kitaip greitaveikėje sąsajoje, antenna ar tankiuose atminties skyriuose.
Išdėstymo realijos taip pat pakeičia istoriją. Mechaniniai apribojimai ir išlaikymo zonos verčia daryti kompromisus, ir šie kompromisai gali sustiprinti porų kelią, kuris buvo nematomas idealiame išdėstyme. Praktikoje energijos sprendimas uždirba pasitikėjimą, kai jis išlieka stabilus ir tylus neidealioje vietoje ir neidealiame maršrute, o ne tik tada, kai jis matuojamas geriausio atvejo demonstracinėje konfigūracijoje.
Paleidimas ir seka, kuri formuoja patikimumo rezultatus
Energijos įjungimo tvarka ir rampas elgesys nusprendžia, ar atminties treniravimas baigiasi nuosekliai, radijo priemonės kalibruojasi be keistų kampinių gedimų, o visada veikiančios srities išlieka stabilios per oranžines nuostatas. Marginalinė seka dažnai sukuria tokį gedimų modelį, kuris išeikvoja laiką ir moralę: „vienas iš penkiasdešimt paleidimų“, sunku atkurti ir dar sunkiau ištaisyti, kai sistema yra visiškai suintegruota.
Sekos dažnai veikia geriau, kai jos yra tvarkomos kaip atkūrimo ir atkūrimo elgesio dalis, o ne vėlyvas kontrolinis sąrašas. Dizainai, kurie laikosi gamyboje, paprastai žiūri į pilną energijos įjungimo/atsisakymo kelią kaip pakartotinę būsenų mašiną, tada įrodo tai blogiausias atvejo tempimo greičiu, šaltoje temperatūroje ir mažos baterijos sąlygose. Automatinis energijos cikliavimas dažnai yra vieta, kur pasitikėjimas įgyjamas, nes jis atskleidžia pertraukiamus kraštus, kurių keletas rankinių energijos perjungimų niekada neatskleidžia.
Pasirinkimo kriterijai kaip sistemos prekybos erdvė
Efektyvumas vertinamas per režimus, o ne kaip trofėjus skaičius
Efektyvumas keičia reikšmę priklausomai nuo to, kaip produktas iš tikrųjų leidžia laiką. Maksimalios apkrovos efektyvumas gali atrodyti įspūdingai specifikacijose, tačiau tikras baterijos veikimo laikas ir šilumos našumas priklauso nuo daugelio veikimo sąlygų, įskaitant sprogimo apdorojimą, normalias apkrovas, lengvas apkrovas ir gilų miego režimą. Išjungimo nuostoliai, laidumo nuostoliai ir raminamoji srovė konkuruoja skirtingai kiekviename regione, ir „nugalėtojas“ keičiasi atsižvelgiant į darbo apkrovos profilį.
Akumuliatoriais maitinamuose dizainuose, žema Iq ir stiprus lengvųjų apkrovų efektyvumas dažnai tiesiogiai atsispindi kaip ilgesnis laikas tarp įkrovimų, kas produktų komandoms dažnai rūpi labai konkrečiu būdu. Serveriams ir tinklo įrangai laidumo nuostoliai ir šilumos apribojimai paprastai dominuoja, nes nuolatinė srovė ir šilumos pašalinimas tampa kasdiene realybe. Pagrindinis būdas nuspręsti yra susieti efektyvumo tikslus su apkrovos laiko pasiskirstymu, o ne optimizuoti veikimo tašką, kuris beveik niekada neatsitinka lauke.
Šilumos rezervas, kuris apsaugo našumą nuo žlugimo šilumoje
Šilumos apribojimai dažnai apibrėžia maksimalų tvarų srovę, kuri savo ruožtu apibrėžia maksimalų tvarų skaičiavimą. PMIC gali atrodyti elektriškai puikiai ir vis tiek praleisti sistemos tikslus, jei jo paketas, varis ir išdėstymas sukuria vietinius karštus taškus šalia atminties, apsauginių dėžių ar temperatūrai jautrių RF blokų. Tikrose surinkimuose, mažos temperatūros kilimai gali sukelti papildomo derinimo elgseną, apsaugines ribas arba ilgalaikio patikimumo problemas, kurių niekas nenori paaiškinti po paleidimo.
Dizainai, kurie sensta gerai, paprastai planuoja šilumos rezervą. Tai planavimas dažnai pasireiškia kaip paketo šilumos charakteristikos, kurios atitinka apkrovą, daugifazės galimybė, kai srovės profilis tai pateisina, ir išdėstymo strategija, kuri skirsto šilumą, laikydama srovės kilpas pakankamai trumpas, kad išvengtų šilumos sprendimų pavertimo triukšmo problemomis.
EMI apribojimai, kurie didina tvarkaraščio ir iteracijos kaštus
Perjungimo dažnis, krašto greičiai ir valdymo topologija stipriai veikia, ar EMI gali būti sprendžiama su paprasta filtracija, ar virsta plokštės sukimo ir vėlai naktinėmis laboratorinėmis sesijomis. Duomenų lapo atitiktis yra tik dalis istorijos; išdėstymo jautrumas gali dominuoti rezultatams. Sprendimas, kuris reikalauja beveik tobulos kilpos geometrijos, gali tapti lošimu, kai mechaniniai apribojimai verčia nepatogius išdėstymus.
Daugelis komandų galiausiai renkasi šiek tiek lėtesnį, labiau kontroliuojamą sprendimą, kuriame slepiasi valdomi srauto greičiai ir prognozuojamas spektro elgesys, nes tai sumažina derinimo laiką ir sumažina sertifikavimo riziką. Tas pasirinkimas gali pasirodyti konservatyvus, tačiau jis dažnai atitinka realybę, kad EMI problemos dažnai pasirodo vėlai, kai tvarkaraštis yra mažiausiai atlaidus.
Apsaugos funkcijos, kurios apibrėžia gedimų patirtį ir paslaugų elgesį
Apsaugos elgesys stipriai veikia sistemos reakciją gedimų sąlygomis. OCP, OVP, OTP ir trumpojo jungimo apsaugos nustatymai gali nulemti, ar sistema atlieka švarų išjungimą, pereina į užrakinimo režimą, ar nuolat perkrauna nepatikimu būdu. Šios reakcijos tiesiogiai veikia gedimų šalinimo sudėtingumą, palaikymo reikalavimus ir bendrą produkto patikimumo suvokimą.
Apsaugos nustatymai taip pat sąveikauja su normaliomis veikimo situacijomis. Agresyvus srovės ribojimas gali sumažinti pažeidimo riziką, tačiau taip pat gali sukelti pakartotinius užsikrovimus intensyvaus srauto momento ar įjungimo šuolių metu. Gedimų tvarkymas paprastai veikia geriausiai, kai jis suderintas kaip dalis numatytos paslaugų strategijos, nusprendžiant, kas turėtų būti bandyta iš naujo, kas turėtų būti užrakinta, kas turėtų būti užfiksuota ir kas turėtų greitai nepavykti, o ne paliktas numatytoms registrų vertėms.
Integracijos kaina, kuri apima programinę įrangą, patvirtinimą ir derinimo realybę
Integracijos kaina retai sustoja ties BOM ir PCB sritimi. Ji apima programinės įrangos darbą, patvirtinimo apimtį, testo laiką, gamybos tvirtumą ir derinimo naštą, kai kas nors nesielgia taip, kaip tikėtasi. Labai integruoti PMIC gali sumažinti komponentų skaičių, kas vilioja, tačiau jie taip pat koncentruoja riziką: vėlyva korekcija viename bėgime gali sukelti didesnės galios medžio dalies pakartotinę kvalifikaciją, nei komanda buvo naplanavusi.
Išsamesni požiūriai gali padidinti schemos pastangas ir dalių valdymą, tačiau jie gali pasiūlyti modulinumą ir lengvesnį pakeitimą, jei tiekimo grandinės sąlygos pasikeičia arba tikimasi vidutinio gyvenimo atnaujinimų. Sąžiningesnis pasirinkimo objektyvas yra programos rizikos apetitas: tvarkaraščio jautrumas, numatomas iteracijų skaičius ir kaip dažnai dizainas greičiausiai bus atnaujintas po pirmo išleidimo.
Skaitmeninės galios funkcijos: lankstumas, kuris turi priedų
Telemetrija, programuojami bėgiai ir dinaminis įtampos reguliavimas gali suteikti realių pranašumų: stipresnis energijos optimizavimas, aiškesnė gedimų diagnostika ir adaptuojamas našumo reguliavimas, kuris atitinka darbo krūvį ir temperatūrą. Tuo pačiu metu šios funkcijos sukuria priklausomybę nuo programinės įrangos, konfigūracijos kontrolės, gamybos programavimo disciplinos ir visiškai naujų gedimų būdų, kurie neegzistuoja paprastesnėse analoginėse konfigūracijose. Telemetrija tampa vertinga tik tuo atveju, kai surinkti duomenys aktyviai naudojami stebėjimui ir dizaino sprendimams, o ne lieka nenaudojami diagnostikos skydeliuose.
Iš praktinės pusės skaitmeninė galia uždirba savo išlaidas, kai uždaro matuojamą ciklą. Jei programavimas gali būti naudojamas derliui atkurti, baterijos tarnavimo laikui pailginti arba užkirsti kelią šilumos apribojimui su kontroliuojamomis politikomis, jis tampa stipriu svertu. Jei jis įgalinamas tiesiog todėl, kad jis yra prieinamas, jis dažnai virsta nenaudojama konfigūracijos paviršiumi, kuris sudėtinga patikrinimą, didina gamybos netinkamos konfigūracijos riziką ir sukelia neaiškumų dėl to, kurie nustatymai yra tikrai numatyti.
Praktinis pasirinkimo ir patvirtinimo srautas, kuris seka sistemos elgesį
Darbo srautas, kuris paprastai atlaiko spaudimą, prasideda nuo sistemos elgesio tikslų, o ne skenuojant PMIC katalogą ir tikintis, kad pasirinkimas veiks vėliau. Jis suskaido problemą į konkrečius, testuojamus gabalus ir verčia aiškumą apie tai, ką reiškia geras elgesys, prieš plokštės paleidimą.
• Paversti darbo apkrovos transeints į bėgių reikalavimus (leidžiama kritimo, nusistovėjimo laikas, pikinė srovė, pakartojimo dažnis).
• Apibrėžti triukšmo biudžetus jautriems blokams (ADC, PLL, SERDES, RF) ir pritaikyti juos prie svyravimo ribų ir schemos prielaidų.
• Nustatyti sekvencingumą, perkrovimo priklausomybę ir trumpų atsigavimo režimus kaip vieną būsenos mašiną.
• Anksčiau įvertinti EMI riziką naudojant realistiškus vietos apribojimus ir numatytą shielding metodiką.
• Patvirtinti apsaugos elgesį su gedimų injekcijomis, kurios primena realius trumpus jungimus, kabelių įvykius ir baterijos kritimus.
ADC / PLL / SERDES / RF
Šis požiūris sumažina vėlyvos stadijos nustebimus, nes jis traktuoja PMIC kaip mechanizmą, kuris valdo energijos elgesį sistemos lygmeniu, o ne kaip foninę paslaugą. Kai energija projektuojama kaip pirmos klasės subsistemos, našumas tampa nuoseklesnis, patikimumą lengviau įrodyti duomenimis, o atitikties darbas būna labiau prognozuojamas, kol komanda praleidžia mažiau laiko gaudydama atsitiktinius gedimus, kurie kyla bėgiuose, o ne logikoje ar programinėje įrangoje.
Ateities kryptys PMIC
Didelis energijos tankis ir mažesnės šerdies įtampos palieka PMICs reguliuoti su siauresniu elektros galimybių diapazonu ir mažesniu atidumo tolerancija. Kai tiekimo linijos yra arčiau skaitmeninio apkrovimo minimalios veikimo taško, net nedidelis sumažėjimas gali pasireikšti kaip minkšti klaidos, perkrovos arba našumo sumažinimas, kuris jaučiasi „paslaptingas“ sistemos paleidimo metu. Tai palaipsniui perkelia projektavimo dėmesį nuo to, kaip tiksliai linija atrodo stabilioje būsenoje, į tai, kaip ji elgiasi per blogiausius, greitai besikeičiančius apkrovos įvykius.
Komandos dažnai susiduria su nepatogia tikrove: kilpa, kuri atrodo ramaus stendo, vis tiek gali elgtis netinkamai produkte, kai tikros darbo apkrovos sukuria aštrius apkrovos žingsnius, lokalizuotus karštus taškus ir nelygų fazių srovės pasidalijimą. Patvaresnis modelis yra laikyti kilpos dizainą, energijos etapo pasirinkimus ir PDN impedansą kaip vieną susietą sistemą, o tada patikrinti elgseną naudojant reprezentatyvius darbo apkrovos parašus, o ne švarius, idealizuotus impulsus.
Greitesni transientai natūraliai traukia dizainus link siauresnių kilpų, tačiau siauresnės kilpos taip pat daro dizainus labiau pažeidžiamus parazitinei induktyvumui, tolerancijos kaupimui ir jutiklių triukšmui, kurį lengva nepakankamai įvertinti ankstyvuoju etapu. Daugelio programų skirtumas tarp stabilaus ir lauko stabilaus kyla iš pagerinto mažosios srovės modeliavimo, patikimo srovės jutiklio ir kompensacijos, kuri yra derinama atsižvelgiant į tikrą išdėstymą.
Didinant perjungimo dažnį gali padėti, tačiau tai automatiškai nereiškia geresnio transientų elgesio, jei jutiklių kelias ir PCB geometrija negali palaikyti pridėtos juostos pločio. Kai tokia nesutampa įvyksta, kilpos stiprumas išleidžiamas triukšmo stiprinimui, kuris gali pasireikšti kaip drebančio perjungimo, girdimo artefakto tam tikrose veikimo režimuose ar EMI pikų, kurie pasirodo tik po mechaninės integracijos.
Šiuolaikiniai skaičiavimo ir ryšio blokai sukuria paklausą, kuri yra spraginta ir kompozicinė, taigi transientų validacija vis labiau atspindi tai, ką programinė įranga ir radijo stotys iš tikrųjų daro, o ne tai, ką apkrovos dėžutė gali apytiksliai atkurti vienu žingsniu.
Dauguma komandų susiburia į darbo srautą, kuris apima:
• Laboratoriniai apkrovų žingsniai
• Platformos telemetrijos žurnalai
• Iteratyvūs atnaujinimai kompensacijos ir izoliacijos pasirinkimams.
Šis požiūris paprastai sumažina vėlyvo etapo staigmenas, ypač kai šilumos ribos palaipsniui suformuoja elektros elgesį ir įtempia ribas laikui bėgant.
Spaudimas sumažinti dydį, tuo pačiu gerinant našumą, plečia integraciją į pakuotę ir aplink esančią struktūrą, o ne tik į lustą. Išplėstas pakavimas ir integruoti pasyvai gali sutrumpinti didelio di/dt kilpas, sumažinti parazitus ir sugriežtinti transientų reakciją būdais, kurie jaučiasi iš karto matomi derinant. Integruoti magnetai gali dar padidinti energijos tankį, tačiau nauda dažnai yra ribojama šiluminiams keliams, mechaniniams apribojimams ir tai, kaip poravimas keičiasi, kai dizainas yra realioje uždaroje erdvėje.
Įdiegta produktuose, tvariausių laimėjimų integracija dažnai kyla iš jautrumo statybų variacijai sumažinimo ir našumo stabilizavimo visame gaminio platinime, o ne tiesiog sumažinant medžiagų sąnaudų sąrašą.
Pakuotės pasirinkimas vis labiau atspindi elektros ir šiluminius rezultatus, įskaitant mažesnį kilpos induktyvumą, pagerintą šilumos sklaidą ir numatomą impedanso kontrolę. Dažna lauko pamoka yra ta, kad dvi plokštės, dalijimosi ta pačia schemą, gali smarkiai išsiskirti elgsena, kai viena konstrukcija išlaiko kompaktišką srovės kilpą, o kita išsklaido energijos taką per PCB.
Didėjant sistemos integracijai, išdėstymo planavimas dažnai prioritetizuojamas ankstyvuoju plėtros etapu, nes vėlesni komponentų pakeitimai ne visada gali ištaisyti problemas, kurias sukelia prasta geometrinė forma ar PCB maršrutas.
Integruoti magnetai gali padidinti efektyvumą aukštesniais dažniais ir sumažinti z-aukštį, kas yra patrauklu kompaktiškuose produktuose. Tuo pačiu metu jie gali įvesti naujus poravimo kelius ir sukurti šiluminius karštus taškus, kurie yra sunkiai aptikti iki vėlyvų prototipų. Sklandžiai veikiančios konstrukcijos paprastai traktuoja induktorių ir paketą kaip derinamą EMI ir šilumos bendrą dizaino temą, įskaitant vietos pasirinkimus netoli antenų, didelio greičio ryšių ir jautrių jutiklių.
EMI praktika turi tendenciją tolintis nuo grynai statiškų sumažinimų ir link kontrolės strategijų, kurios numato veikimo sąlygas. Tokios technikos kaip spektro platinimas, protingesni įėjimo tvarkytuvai ir turtingesni ant mikroschemos sensoriai gali sumažinti pikus, tačiau jos taip pat reikalauja koordinacijos, kad būtų išvengta tiesioginių viršijimo emisijų už platiaplanį triukšmą ar radijo trikdžius.
Dauguma komandų matė sekos eigą: ankstyvi EMI tikrinimai praeina, vėliau gamybos nesėkmingos, kai keli reguliatoriai perjungia koreliuotais modeliais, kai naujas programinės įrangos tvarkaraštis keičia darbo apkrovos laiką, arba kai kabeliai ir skydai keičia grąžinimo kelius. Šios patirtys skatina EMI mąstymą pakilti iki platformos lygio, o ne laikyti kiekvieną reguliatorių kaip izoliuotą dėžutę.
Kai perjungimo kraštai greitėja, dv/dt valdymas vis labiau įtakoja tiek emisijas, tiek ilgalaikį stresą. Vartų vairuotojai prideda daugiau programavimo galimybių, o apsaugos logika tampa labiau konteksto areštu, kas gali padaryti derinimą labiau panašų į sistemų inžineriją, o ne komponentų pasirinkimą.
Praktinė įprotis, kuris taupo laiką, yra derinti krašto greičius naudojant matavimus, atliktus galutinėje mechaninėje konfigūracijoje, nes ekranavimas, laidai ir žemės struktūros dažnai keičia EMI rezultatą būdais, kurių atvira plokštė neatskleidžia.
Tobulesnė on-chip jutiklių technologija leidžia adaptacinius elgesius, pavyzdžiui, keisti perjungimo elgesį, kai emisijos priartėja prie ribos arba kai keičiasi veikimo režimas. Per laiką tai stumia PMICs nuo fiksuoto funkcionalumo elgesio link valdomų subsistemų, kurios nuolat derina našumą, triukšmą ir šilumines sąlygas remiasi atsiliepimais, o ne prielaidomis.
Akumuliatoriais maitinamos sistemos toliau siekia ultra-mažo stovinčio srovės ir stiprių lengvųjų apkrovų efektyvumo naudojant tokias technikas kaip PFM/burst veikimas, diodų emuliacija ir automatinis režimo pasirinkimas. Emocinis įtempimas, kurį daugelis komandų pripažįsta, yra tai, kad tie patys lengvųjų apkrovų režimai, kurie atrodo puikiai duomenų lapuose, gali įnešti bangas, girdimus artefaktus ar periodinius EMI parašus, kurie akivaizdūs net jei vidutinė efektyvumas atrodo puikus.
Norėdami sumažinti neaiškumą, komandos vis labiau apibrėžia, ką reiškia priimtinas budėjimo elgesys konkrečiais terminais, tuomet pasirenka režimo strategiją, kad ji atitiktų.
Dažnai specifikuojami tikslai apima:
• Bangų ribos miegant/budint
• Pabudimo vėlavimas
• Akustikos/triukšmo apribojimai
• EMI elgesys atliekant periodinę priežiūros veiklą.
Praktikoje akumuliatoriaus tarnavimo laikas pagal realius darbo ciklus dažnai pasakoja istoriją patikimiau nei maksimalios efektyvumo vertės, ypač kai darbo ciklas apima miegą, periodinį pabudimą, radijo sprogimus ir jutiklių mėginių ėmimą.
Automatinis režimo keitimas yra patrauklus, tačiau perėjimai gali sukelti trumpus sutrikimus, kurie išnyksta su vidutiniais matavimais ir pasirodo tik kaip reti atstatymai arba periodiniai triukšmo skundai. Dizainai, kurie lauke jaučiasi "tvirti", paprastai skiria papildomą patvirtinimo pastangą tiesiai ties PFM ir PWM ribomis, įskaitant pabudimo sekvecavimą, sekvenavimo vėlavimus ir ribinių sąlygų apkrovos žingsnius.
Pasikartojanti tendencija yra ta, kad agresyviausias efektyvumo nustatymas ne visada yra patogiausias produkto pasirinkimas, kai jis sukelia bangas, kurios keičiasi priklausomai nuo sąlygų ar triukšmo poravimosi, kurį sunku atkurti. Dauguma komandų galiausiai pasirenka konfigūraciją, kuri atiduoda nedidelį efektyvumo kiekį už elgesį, kuris yra pakartojamas skirtingose temperatūrose, gamybos variacijose ir scenarijuose, kad dažnai sumažintų integracijos riziką ir sumažintų palaikymo srautą.
Augant kompiuterinių platformų galimybėms, jos vis labiau remiasi tiksliu telemetrija, adaptiviu įtampos keitimu ir apsauga, kuri koordinuojama daugeliui juostų. Telemetrija atlieka praktinę rolę kasdieniame inžinerijos darbe: ji gali sutrumpinti įrengimą, pagreitinti problemų analizę ir sumažinti pagundą perprojektuoti "tiesioginiais atvejais" atskleisdama, kur iš tikrųjų yra rezervas.
Telemetrija dažniausiai yra svarbiausia, kai sąlygos greitai keičiasi, o ne kai juosta yra stabili ir lengva matuoti. Ateities PMICs greičiausiai patobulins mėginių ėmimo elgesį, filtravimo pasirinkimus ir laiko suderinimą, kad programinės įrangos sprendimai glaudžiau atitiktų realybę.
Viena detalė, kurią patyrusios komandos dažnai vertina, yra ta, kad daugiau mėginių automatiškai nereiškia daugiau naudos; nuoseklumas, kalibravimo stabilumas per temperatūrą ir aiškūs pralaidumo ir vėlavimo apibrėžimai dažnai nusprendžia, ar duomenimis galima pasitikėti.
Daugiau juostų reiškia didesnį koordinuoto apsaugos elgesio reikalingumą, kad sistema reaguotų nuosekliai, o ne iš juostos į juostą.
Apsaugos koordinavimas dažnai apima:
• OCP reakcijos elgesys
• OVP reakcijos elgesys
• UVP reakcijos elgesys
• OTP reakcijos elgesys
• Sekvenavimo priklausomybės
• Klaidos atkūrimo politikos
• Būsenos dalijimasis tarp PMICs
Realiuose sistemose dažnai nesėkmė ne todėl, kad trūksta funkcijos, o todėl, kad juostos į tą pačią įvykį reaguoja skirtingai, sukeliančios mažo įtampos kaskadą ar perkrovimo kilpas, kurios yra varginančios diagnozuoti. Koordinuotas gedimų valdymo požiūris, bendras statusas ir vieninga atkūrimo planas geriau atitinka, kaip platformos tikėtinos elgiasi po stresu.
GaN ir SiC naudojimas augs srityse, kur pereinamosios dažnio ir efektyvumo savybės materiališkai keičia dydį ar našumo ribas. Greitesnis perjungimas gali sumažinti magnetinius elementus ir pagerinti perėjimo reakciją, tačiau taip pat padidina dv/dt susijusius streso, EMI jautrumą ir reikalavimus dėl vartų vairavimo projekto ir izoliacijos strategijos. Ribojimai nėra tik elektriniai; jie taip pat apima veikimo ribas, susijusias su gamybos variacijomis ir realaus pasaulio neteisėtais scenarijais, kuriuos komandos išmoko vertinti rimtai.
GaN ir SiC sprendimai linkę apdovanoti tiksliu vartų vairavimo valdymu, disciplinuota išdėstymu ir apsaugos schemomis, kurios neleidžia pertekliui, žvangėjimui ir nenorimai įsijungti. Praktinė įžvalga, kuri kartojasi nuolat, rodo, kad išdėstymo kokybė gali nulemti įrenginio pasirinkimą; gerai įgyvendintas išdėstymas su „išmatuotu“ įrenginiu gali pranokti aukščiausios klasės įrenginį, kuris buvo įdėtas į triukšmingą, induktyvią kilpą.
Kylant perjungimo greičiams, izoliacijos pasirinkimai ir ilgalaikio patikimumo ribos tampa labiau akcentuojamos projektavimo apžvalgose ir kvalifikacijos planavime. Priėmimas paprastai pagreitėja, kai našumo prieaugiai aiškiai pateisina papildomą projektavimo griežtumą, tuo tarpu kainai jautrūs ar triukšmui jautrūs produktai dažnai juda atsargiau ir reikalauja aiškesnių įrodymų apie sistemos lygio naudą.
PMIC vis labiau formuojami, kad elgtųsi kaip politikos vykdytojai, kurie arbitruoja efektyvumą, triukšmą, šilumą ir patikimumą realiu laiku. Architektūros, kurios paprastai gerai sensta, traktuoja energiją kaip valdomą išteklių: PMIC telemetrija informuoja programinės įrangos politiką, o programinės įrangos politika savo ruožtu reguliuoja PMIC veikimo režimus ir energijos elgseną. Tai neryškina ribą tarp aparatūros ir programinės įrangos nuosavybės tokiu būdu, kuris iš pradžių gali pasirodyti nepatogus, tačiau dažnai atsiperka sumažindamas ribų kaupimą ir pagerindamas atsparumą realioms darbo apkrovoms.
Išvada
Efektyvi grandinės apsauga priklauso ne tik nuo vienos apsauginės dalies pridėjimo. Patikimi projektai reikalauja tinkamo koordinavimo tarp perkrovos nukreipimo, įtampos ribojimo, srovės ribojimo, žemės, išdėstymo ir gedimo laiko. Kiekvienas apsaugos prietaisas turi savo stiprybes ir ribas, todėl pasirinkimas turi atitikti numatomą gedimo tipą, energijos lygį, reakcijos greitį ir veikimo aplinką. Gerai suplanuota apsaugos strategija padidina saugumą, sumažina gedimo riziką ir palaiko ilgalaikį patikimumą realiose elektroninėse sistemose.
Dažnai užduodami klausimai (FAQ)
1. Kodėl PMIC laikomas sistemos lygio energijos koordinatoriumi, o ne tik įtampos reguliatoriumi?
PMIC atlieka daug daugiau nei tiesiog konvertuoja vieną įtampą į kitą. Jis valdo, kaip keli energijos šaltiniai generuojami, seka, stebimi, paskirstomi ir apsaugomi visoje sistemoje. Praktiniuose projektuose PMIC koordinuoja procesoriaus energijos šaltinius, atminties tiekimus, RF skyrius, jutiklius ir periferinius domenus, taip pat valdo paleidimo laiką, gedimų atkūrimą, šiluminius įvykius ir energijos gerumą signalizuojant. Kadangi visi šie elgesiai bendrauja paleidimo ir veikimo metu, PMIC dažnai tampa viena iš pagrindinių sistemų patikimumo ir stabilumo formavimo veiksnių.
2. Kodėl PMIC susiję gedimai dažnai pasireiškia tik realiomis apkrovomis, o ne paprastu laboratoriniu testavimu?
Su stacionarinėmis apkrovomis atliekami bandymai retai reprodukuoja greitą pereinamojo elgesio, sukurtą modernių procesorių, RF siųstuvų, atminties srauto ir jutiklių pliūpsnių. Realistiškomis veikimo sąlygomis energijos šaltiniai patiria staigius srovės smūgius, kurie atskleidžia silpnybes pereinamojo reagavimo, PCB parazitų, kompensavimo derinimo ir išėjimo tinklo stabilumo srityse. PMIC gali atrodyti stabilus kontroliuojamų bandymų metu, tačiau vėliau gali rodyti nuolydį, perteklių, žvangėjimą ar sekos gedimus, kai realios apkrovos sukelia greitai kintančią elektros paklausą.
3. Kodėl energijos sekos sąlyga laikoma sistemos lygio sutartimi, o ne paprastu paleidimo bruožu?
Daugelis skaitmeninių sistemų reikalauja specifinių laiko santykių tarp pagrindinių energijos šaltinių, atminties šaltinių, I/O tiekimo, paleidimo signalų ir visada įjungtų domenų. Jei energijos šaltiniai kyla neteisinga tvarka arba su neteisingu laiku, procesoriai, SRAM laikymo blokai ir didelio greičio sąsajos gali patekti į neapibrėžtas veikimo būsenas. Šios problemos dažnai sukelia netikėtus paleidimo gedimus, kurie pasireiškia tik esant ekstremalioms temperatūroms, sumažinus įtampą ar esant akumuliatoriaus šiltų kišimui. Todėl tinkamas sekos sąlyga tampa koordinuota sutartimi tarp aparatūros, programinės įrangos ir silicio reikalavimų, o ne patogumo bruožu.
4. Kodėl PMIC pereinamojo reagavimo savybės tyliai gali riboti tikrą viso pasaulio CPU ir GPU našumą?
Modernūs procesoriai generuoja staigius srovės žingsnius pakėlimo operacijų, AI darbo krūvių, žaidimų pliūpsnių ir radijo veiklos metu. Jei PMIC negali išlaikyti stabilios įtampos šių įvykių metu, mikroschemų programinė įranga gali sumažinti pakėlimo trukmę, sumažinti laikrodžio greitį arba išplėsti laikymo ribas, kad būtų išvengta avarijų. Daugelyje produktų energijos tiekimo ribojimai tyliai riboja ilgalaikį našumą, net jei pats procesorius atrodo pajėgus pagal popierių. Stabilus laikinas atsakas dažnai turi didesnę įtaką naudojamo sistemos našumui nei vien tik maksimalių efektyvumo specifikacijų.
5. Kodėl PMIC banguojančios ir perjungimo triukšmo problemos išplinta toli už energijos subsistemos ribų?
Perjungimo harmonikos ir plačios juostos triukšmas gali susilieti su RF grandinėmis, ADC referencijomis, PLL, SERDES jungtimis ir jautriais analitiniais keliais per bendrą žemės impedansą ir PCB parazitinius elementus. Net palyginti mažas banguojančios įtampos lygis gali sumažinti ADC tikslumą, padidinti fazės triukšmą, sumažinti laikymo ribą arba pabloginti didelės spartos komunikacijos patikimumą. Geležinkelis, kuris atrodo elektriškai priimtinas izoliuotai, gali sukurti rimtų signalų vientisumo problemų, kai jis integruojamas į tankius mišrius signalų sistemas.
6. Kodėl PMIC šilumos limitai dažnai apibrėžia maksimalią ilgalaikę skaičiavimo našumą?
PMIC temperatūrai kylant, efektyvumas mažėja, o šilumos apsaugos mechanizmai gali pradėti mažinti prieinamą srovę arba sukelti atgalinio veikimo elgesį. Kompaktiškose sistemose lokalizuoti karšti taškai netoli procesorių, atminties ar RF skyrių gali priversti PMIC pradėti šiluminį derating'ą ilgai prieš pasiekiant teorinius elektros ribas. Dėl to ilgalaikis sistemos našumas dažnai priklauso tiek nuo šiluminio išdėstymo, vario paskirstymo ir paketo pasirinkimo, kiek ir nuo pačių reguliatorių specifikacijų.
7. Kodėl inžinieriai dažnai derina buck keitiklius su LDO reguliatoriais jautriuose dizainuose?
Buck keitikliai suteikia efektyvų įtampos sumažinimą didelės srovės rails, tačiau įveda perjungimo banguojančią ir EMI. LDO sukuria daug švaresnę išėjimo įtampą su mažesniu triukšmu, tačiau daugiau šilumos švaisto, kai sumažina didesnes įtampas. Įprastas kompromisas naudoja buck keitiklį, kad efektyviai sukurtų tarpinę rail, po to sekantį LDO, kad išvalytų galutinį jautrų analitinį ar RF tiekimą. Ši kombinacija efektyviau subalansuoja efektyvumą, šilumos valdymą ir triukšmo mažinimą nei remiasi bet kuria architektūra atskirai.
8. Kodėl PMIC gedimų reagavimo politikos laikomos visos produkto patirties dalimi?
Gedimų elgesys nustato, ar produktas tvarkingai užsidaro, įeina į naujo paleidimo ciklą, švelniai apriboja arba tampa nestabilus neįprastomis sąlygomis. Apsaugos nuo per didelės srovės, šilumos išjungimas, mažos įtampos valdymas ir atkūrimo laikai tiesiogiai veikia, kaip patiriami akumuliatorių gedimai, kabelių problemos ar perkrovos įvykiai. Gerai suprojektuotos PMIC politikos prognozuojamai izoliuoja gedimus ir atkuriami kontroliuojamais būdais, sumažinant aptarnavimo sudėtingumą ir užkertant kelią mažoms problemoms išaugti į sistemos masto gedimus.
9. Kodėl šiuolaikiniai PMIC vis labiau remiasi telemetrija ir programuojamomis energijos politikomis?
Šiuolaikinės sistemos dinamiškai keičia darbo krūvį, šilumos būseną, radijo veiklą ir įkrovimo elgesį realiuoju laiku. PMIC telemetrija leidžia mikroschemų programinei įrangai nuolat stebėti rail sąlygas, srovės suvartojimą, temperatūrą ir gedimų įvykius. Šie duomenys leidžia atlikti adaptacinį įtampos skalavimą, šilumos valdymą, protingą apribojimą ir koordinuotus apsaugos sprendimus. Tačiau programuojamos energijos sistemos taip pat įveda naują patikros sudėtingumą, nes neteisinga mikroschemų programinės įrangos konfigūracija gali sukelti gedimus, kurie neegzistuoja fiksuotose analoginėse konstrukcijose.
10. Kodėl ateities PMIC dizainai pereina prie „energijos orkestravimo“ vietoj paprasto energijos konvertavimo?
Ateities PMIC vis dažniau tikimasi koordinuoti efektyvumą, šilumą, EMI elgesį, apsaugą, darbo krūvio skalavimą, įkrovimo politiką ir sisteminę telemetriją vienu metu. Greitesnės perjungimo technologijos, griežtesnės įtampos ribos ir labai dinamiški darbo krūviai reikalauja, kad PMIC nuolat prisitaikytų savo elgseną remiantis realiomis veikimo sąlygomis, o ne statinėmis prielaidomis. Ši evoliucija paverčia PMIC aktyviu valdymo subsistemu, kuri glaudžiai bendradarbiauja su mikroschemų programine įranga ir sistemos programine įranga, kad išlaikytų stabilų, efektyvų ir prognozuojamą platformos veikimą besikeičiančiomis sąlygomis.
Susijęs tinklaraštis
-
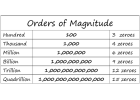
Kiek nulių per milijoną, milijardus, trilijonus?
![Kiek nulių per milijoną, milijardus, trilijonus?]()
2024/07/29
Milijonas reiškia 106, lengvai sugriebtas skaičius, palyginti su kasdieniais daiktais ar metiniais atlyginimais. Milijardas, lygi 109, pradeda tempt... -
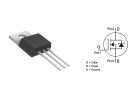
„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“
![„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“]()
2024/08/28
„IRLZ44N“ yra plačiai naudojamas N-kanalo galios MOSFET.Garsusi dėl puikių perjungimo galimybių, jis labai tinka daugybei programų, ypač galio... -
Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?
![Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?]()
2024/10/6
Mobiliojo telefono akumuliatoriaus įkrovimo problemos yra įprastos, tačiau juos galima efektyviai valdyti.Temperatūra vaidina didelę įtaką akum... -
BC547 TRANSISTORAS KLAUSIMAS VADOVAS
![BC547 TRANSISTORAS KLAUSIMAS VADOVAS]()
2024/07/4
BC547 tranzistorius dažniausiai naudojamas įvairiose elektroninėse programose, pradedant nuo pagrindinių signalo stiprintuvų iki sudėtingų osci... -
Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)
![Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)]()
2024/04/22
Silicio valdomi lygintuvai (SCR) arba tiristoriai vaidina pagrindinį vaidmenį „Power Electronics“ technologijoje dėl jų našumo ir patikimumo.Š... -
LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai
![LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai]()
2024/07/15
LR621 ir SR621SW mygtukų baterijos yra paplitusios kompaktiškuose elektroniniuose įrenginiuose, tokiuose kaip laikrodžiai, maži žaislai, skaiči... -
Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose
![Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose]()
2025/09/20
Multiplekseriai yra komponentai skaitmeninėse sistemose, skirtos nukreipti kelis įvesties signalus į vieną išvesties liniją, naudojant dvejetain... -
OP-AMP grandinių pagrindai
![OP-AMP grandinių pagrindai]()
2023/12/28
Sudėtingame elektronikos pasaulyje kelionė į jos paslaptis visada veda mus į grandinės komponentų kaleidoskopą, tiek išskirtinį, tiek sudėti... -
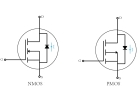
Palyginus NMO ir PMOS skirtumus ir programas
![Palyginus NMO ir PMOS skirtumus ir programas]()
2024/11/15
Suprantant efektyvias grandines, svarbu suprasti NMOS ir PMOS tranzistorių skirtumus.NMOS (N-type Metal-Oxide-Semiconductor) and PMOS (P-type Metal-O... -
CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti
![CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti]()
2025/09/15
Mygtukų baterijos, tokios kaip CR2450 ir CR2032, maitina daugybę kasdienių elektronikų, pradedant laikrodžiais ir nuotoliniais nuotoliniais mokes...




Karštos dalys
- CY37032VP44-143AC
- CL21C150JCANNNC
- AD7792BRUZ-REEL
- TACL685K002R
- LTC2657BIFE-L16#PBF
- AT49LV040-15JC
- SVF4N60DTR
- C0603JB1C224M030BC
- PW103-10
- C3216X7T2J473K160AC
- BCM5421SKQM-P11
- FSV530AF
- DG643DY-T1-E3
- 0201YA470JAT2A
- 1808CA332KAT1A
- DS90UB927QSQ
- ZXMS6005SGTA
- MST7915MC-LF
- STM6601CM2DDM6F
- S98WS01GPFOFW0030A
- GRM1885C1H5R7DZ01D
- IRFH5210TRPBF
- AD5545BRUZ-REEL7
- XC9536-10PCG44C
- HN27C4096CC-10
- BA6846FV-E2
- SAA7191WP
- QM15TE-HB
- SN74LVC2G07YZPR
- XRT3590ID-F
- SLG505YC264CT
- ADV7180WBST48Z-RL
- VI-2NL-EX
- GRM155R61H104KE19D
- KS57P21516Q
- MIC5163YMM
- BCM4330GKWBG
- LTC2055CMS8#TRPBF
- VI-B62-IX
- LTC3119EUFD
- AM29LV800DT-70ED
- GVT7164D36T-3
- MRF150
- S414007ADJ
- TPS71219DRC
- VSC7428XJG
- X904169-003
- XMR-06VF
- MAX31341CETB+
- BL652-SA-01