- lietuvių
-
EnglishDeutschItaliaFrançais한국의русскийSvenskaNederlandespañolPortuguêspolski繁体中文SuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикGalegolietuviųMaoriRepublika e ShqipërisëالعربيةአማርኛAzərbaycanEesti VabariikEuskeraБеларусьLëtzebuergeschAyitiAfrikaansBosnaíslenskaCambodiaမြန်မာМонголулсМакедонскиmalaɡasʲພາສາລາວKurdîსაქართველოIsiXhosaفارسیisiZuluPilipinoසිංහලTürk diliTiếng ViệtहिंदीТоҷикӣاردوภาษาไทยO'zbekKongeriketবাংলা ভাষারChicheŵaSamoa日本語SesothoCрпскиKiswahiliУкраїнаनेपालीעִבְרִיתپښتوКыргыз тилиҚазақшаCatalàCorsaLatviešuHausaગુજરાતીಕನ್ನಡkannaḍaमराठी
Kaip pasirinkti šuntinį rezistorių tiksliam srovės matavimui
Katalogas

Šuntinės varžos pasirinkimas
Pasirinkus šuntinio rezistoriaus vertę, nustatomas, kaip elgsis srovės matavimo grandinė realiame produkte, o ne tik skaičiuoklėje. Vienas pasirinkimas paliečia tris dalykus vienu metu:
• visišku mastu naudojamą jautrumo įtampą, su kuria galite dirbti
• šilumą, kurią sukels rezistorius
• papildomą įtampos kritimą, kurį jaus apkrova.
Praktikoje dažnai tai priklauso nuo to, kiek jums patogus yra signalo margine, palyginti su tuo, kiek nuostolių ir galimybių esate pasirengę toleruoti.
Daugelis komandų jaučia trauką link kuo mažesnio R efektyvumui; ta intencija yra suprantama. Bet problema ta, kad maža šuntinė įtampa linkusi paversti mažas, nuobodžias neidealijas į ilgas derinimo sesijas.
Pradėkite pasirinkdami šuntinę įtampą maksimaliai srovei, kurią jūsų stiprintuvas ir ADC gali užfiksuoti su erdve tolerancijai, temperatūrai ir triukšmui. Plačiai naudojamas pilnas masto langas yra maždaug:
• 50–100 mV
o aukštesnės galios arba sandaraus erdvės dizainai dažnai būna arčiau:
• 10–30 mV
kad sumažintų nuostolius ir apsaugotų apkrovos įtampą.
Paprastai nusprendžia, ar tikslas atrodo „patogiai“ vėliau, ne skaičius pats savaime, bet kiek toli jis sėdi virš klaidų, kurias tikrai pamatysite darbo vietoje.
Šuntinė įtampa, kuri atrodo gerai nominaliame skaičiavime, gali jaustis nepatogiai maža, kai atsiskleidžia blogiausi veikimo efektai:
• ofsetas
• driftas
• šiluminiai gradientai
• kvantizacija
• trikdžiai
Jei kada nors stebėjote, kaip nulinės srovės rodmuo klaidžioja per šilumos svyravimą, emocinis lankas yra pažįstamas:
• pasitikėjimas kambario temperatūroje
• tada lėtai kylantis abejonės
• tada vėlyvo vakaro bandymas pataisyti tai programinės įrangos pagalba.
Įėjimo ofsetas ir driftas gali sunaudoti nustebinančią dalį mažos šuntinės signalas. Kai dizainas pernelyg remiasi labai mažu VSHUNT, komandos dažnai pastebi, kad be apkrovos vertė atsisako likti arti nulio skirtingose temperatūrose, ir jos stumiamos link:
• daugiau kalibravimo žingsnių
• daugiau kompensacijos logikos
• arba abiejų.
Varžos ir lydinio perėjimai gali generuoti mikrovoltų lygio termoelectrinės įtampos, esant temperatūrų gradientams. Tai lengva atmesti kaip per mažą, kad būtų galima rūpintis, kol šuntas sėdi šalia:
• karštas induktorius
• MOSFET šilumos skleidiklis
• oro srauto riba, kur gradientai reguliariai įvyksta.
Jei ADC (įskaitant jo triukšmą) generuoja tik nedidelį efektyvių skaičių operatyviame intervale, išėjimas linkęs atrodyti šokinėjantis, o valdymo ciklai gali pradėti elgtis jautriai esant lengvai apkrovai. Dizainas, kuris elgiasi mandagiai nominalioje srovėje, vis tiek gali parodyti kvantizacijos sukeltą virpėjimą, kai signalas sumažėja.
Mažos šuntų įtampos yra lengviau užteršti per:
• perjungimo mazgo poravimą
• gruntinį šuolį
• magnetinį paėmimą
• išdėstymo susijusius parasitus.
Kai galingumo perjungimo etapai yra netoli, išdėstymo ir filtravimo darbai paprastai greitai auga, kai VSHUNT mažėja.
Praktinis požiūris yra nustatyti pilnos skalės VSHUNT, kad jis liktų patogiai virš bendro blogiausio atvejo offset ir triukšmo matavimo juostoje, kuriai iš tikrųjų rūpite. Kai signalas per mažas, komandos dažnai praleidžia dienas ieškodamos:
• išdėstymo patobulinimų
• filtravimo eksperimentų
kurie niekada nesijaučia visiškai patenkinti.
Nustačius pilnos skalės šuntų įtampos tikslą, apskaičiuokite pirmo karto varžą tiesiogiai:
Pavyzdys (50 mV prie 5 A):
R = 0.05 / 5 = 0.01 Ω
Laikykite tai kaip pradines atramas. Po šio taško vertė paprastai šiek tiek keičiasi dėl:
• šiluminio elgesio
• galimybių apribojimų
• pakuotės prieinamumo
• to, ką prototipas jums moko.
Pasirinkę R, apskaičiuokite šuntų dissipaciją prie didžiausios srovės:
Pavyzdys:
PSHUNT = 52 × 0.01
PSHUNT = 25 × 0.01
PSHUNT = 0.25 W
Padeda galvoti apie PSHUNT kaip apie įvestį į šiluminį dizainą, o ne kaip apie greitą duomenų lapo patikrintą langelį. Net jei rezistoriaus galingumo reitingas atrodo dosnus, realios surinktos dalys gali veikti karščiau dėl:
• riboto vario ploto
• šilumos iš gretimų komponentų
• apsaugos apribojimų
• silpno oro srauto.
Prieš pradedant, gana dažnai galima stebėti, kaip rodmenys svyruoja po kelių minučių, kai šuntas ir aplinkinis varis įšyla, keisdamas varžą ir atitraukdamas matuojamą srovę kartu su juo, patirtis, kuri gali būti labiau erzinanti, nei skamba, kai bandote uždaryti kontrolės kilpos stabilumo problemą.
Norint tiksliai matuoti srovę, šunto tolerancija ir temperatūrinis varžos koeficientas (TCR) dažnai tiesiogiai pasirodo klaidų biudžete, kartu su:
• stiprintuvo apribojimais
• ADC apribojimais.
1% šuntas pradeda su maždaug 1% padidėjimo klaida prieš:
• stiprintuvo offset
• ADC padidėjimo klaida
• referencijos nuokrypis
pasirodo paveiksle. Jei griežtesnis tikslumas yra tikslas, tipiniai keliai apima:
• naudojant tikslesnį šuntą
• kalibruojant gamyboje
• abu derinant.
Savikaitoje šuntas pakyla virš aplinkos temperatūros, o varža keičiasi su tos temperatūros pakilimu. Nuolatinėje didelės srovės veikloje tas nuokrypis gali dominuoti tai, ką matote lauke. Kai temperatūros pakilimas nėra tikslus, dažnai mažiau stresuoja manyti, kad pakilimas yra didesnis nei idealus modelis numato, o po to patvirtinti su ankstyvais įrenginių matavimais (įskaitant stabilizuotą būseną).
Padidinus VSHUNT, paprastai pagerėja matavimo marža:
• atpalaiduojant offset/trikšmą spaudimą priekiniame gale
• padidinant signalo triukšmo santykį
tuo pačiu metu:
• mažinant efektyvumą
• vagyste krūvio įtampos.
Sumažinus VSHUNT, daroma priešingai ir paprastai daugiau apkrovos pasislenka ant:
• analoginio priekio
• išdėstymo disciplina
• skaitmeninio filtravimo.
| Faktorius |
Aukštesnis VSHUNT |
Žemesnis VSHUNT |
| Signalo Marža |
Geriau |
Žemesnis |
| Efektyvumas |
Žemesnis |
Aukštesnis |
| Įtampos Kritimas |
Aukštesnis |
Žemesnis |
| ADC Reikalavimai |
Mažiau Reikalavimo |
Daugiau Reikalavimo |
| Triukšmo Jautrumas |
Žemesnis |
Aukštesnis |
| Galingumo Dissipacija |
Aukštesnis |
Žemesnis |
Šablonas, kuris pasirodo projektuose, kurie atrodo ramūs gedimams, yra vengti absoliutaus minimumo V_SHUNT, nebent efektyvumas dominuoja sistemos tikslus. Šiek tiek galimybių, skirtų matavimo maržai, dažnai atsiperka kaip:
• mažiau klaidingų apsaugos nutraukimų
• stabilizesnė kontrolės elgsena
• mažiau laiko, galvojant, ar keistas rodmuo yra fizika, ar išdėstymo artefaktas.
Kai R nukrinta į miliohmų ribą, nepageidaujama serijinė varža:
• pėdsakuose
• perėjimuose
• jungikliuose
• litavimo jungtisse
pradeda konkuruoti su šuntu pačiu. Šiuo atveju papildomas 1–5 mΩ iš maršruto ir tarpusavio jungties gali būti didelė dalis numatytos vertės, o matuojama srovė gali svyruoti su:
• surinkimo variacija
• jungčių senėjimu
• perdirbimu.
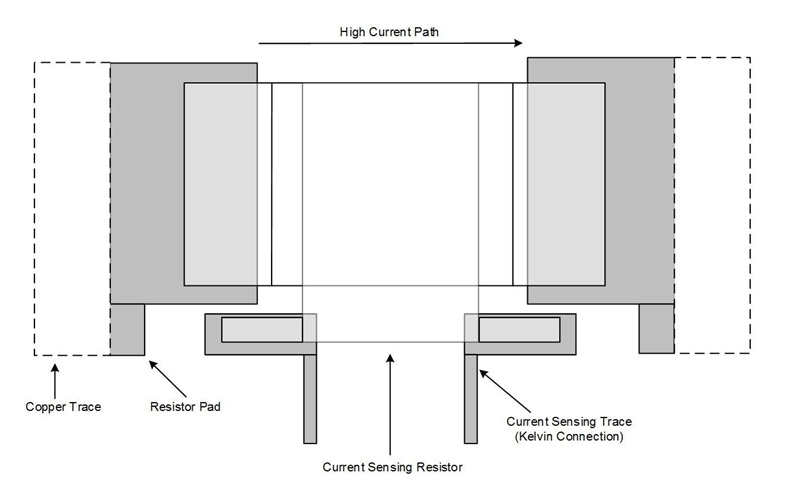
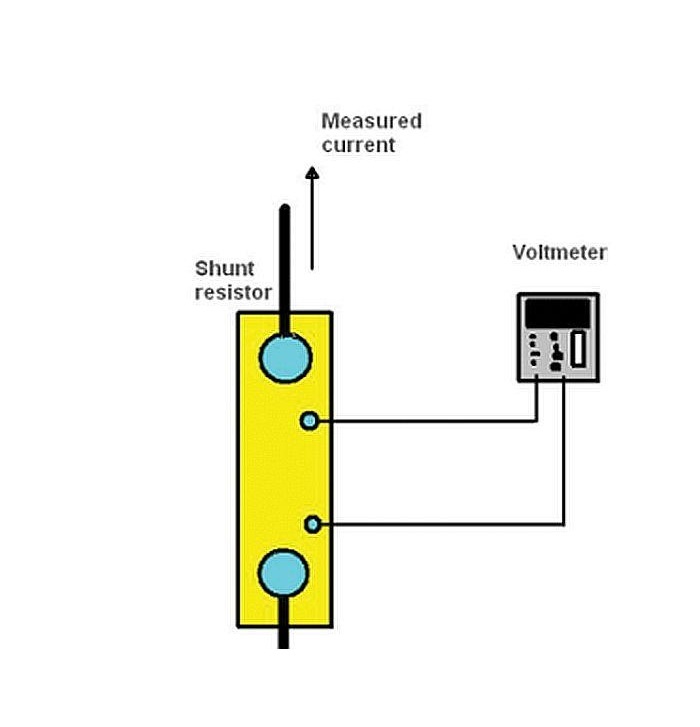
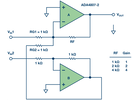
Dėl mažos vertės šuntų keturių terminų jungtys su atsargiu maršrutu neleidžia apkrovų srovėms būti neteisingai nuskaitytoms kaip šuntų įtampa. Be Kelvin jutiklio, klaida tendencija yra priklausoma nuo srovės ir varginančiai nevienoda skirtingose konstrukcijose.
Jei tikslas apima greitą tranzitų fiksavimą, didelis filtravimas gali paslėpti įvykius, kuriuos bandote išmatuoti; jei filtravimas pernelyg lengvas, perjungimo svyravimai gali dominuoti skaitomoje reikšmėje. Pasirinkto varžos dydžio sąveika su filtravimu, nes jis nustato signalo amplitudę, palyginti su:
• svyravimu
• paėmimu
• ADC triukšmu.
Struktūruota jautrumo patikra gali pateikti daug to, ko žmonės tikisi iš modelio, su mažiau paslėptų prielaidų ir daugiau veiksmingų skaičių.
Kiekvienam kandidatui R apskaičiuokite:
• VSHUNT esant IMAX
• PSHUNT esant IMAX
• numatomas temperatūros padidėjimas (paketui + vario plotui + oro srautų prielaidoms)
• tikėtini klaidų terminai (nulinis nuokrypis, drifteris, ADC kvantizacija ir triukšmas).
Pragmatiškas požiūris yra pasirinkti mažiausią varžą, kuri vis dar suteikia stabilų skaitymą įvairiomis temperatūromis ir veikimo triukšmo sąlygomis, įskaitant lengvo apkrovimo elgesį. Tai paprastai leidžia pasiekti pusiausvyrą tarp efektyvumo ir matavimo pasitikėjimo, ir sumažina tikimybę, kad vėlyvas siurprizas bus paslėptas, kur tikslumas atrodo normalus šaltas ant stalo, bet pablogėja po šildymo arba kai įrenginys uždaromas jo dėžutėje.
Energijos praradimas ir šiluminis dizainas
Įvertinkite elektrinius nuostolius tikrojoje veikimo sąsajose
Šuntinė varža paverčia elektros energiją šiluma labai prognozuojamu būdu, ir ši prognozė yra raminanti, kol tikrosios veikimo režimai pradeda kauptis vienas ant kito. Pradėkite nuo pagrindinės santykio: P = I²R.
Pavyzdinė bazė: 5 A per 0.01 Ω → P = 25 × 0.01 = 0.25 W.
Tas 0.25 W yra pradinė nuoroda diskusijai, o ne sustojimo taškas, nes temperatūros padidėjimas ir ilgalaikiai varžos pokyčiai paprastai yra tie, kurie sukelia nepatogius siurprizus vėliau patvirtinant.
Naudokite didžiausią nuolatinį srovę, kurią produktas gali realiai išlaikyti, tada išplėskite jį kasdienėms realybėms, kurios inžinieriams kartais norėtų būti mažesnės: tolerancija, kalibravimo nuokrypiai, kontrolės ciklo klaidos ir tiekimo svyravimai.
Taip pat įvertinkite ilgos trukmės didelės srovės veikimo režimus, nes pakartotiniai srovės apkrovimai, trunkantys kelias sekundes, gali prisidėti prie šildymo būdu, kuris primena nuolatinį veikimą, o ne trumpą tranzitinį įvykį.
Daugelyje konstrukcijų ši griežta kombinacija nėra atskira duomenų lapo vienetė; tai yra didelė apkrova plus šilta dėžutės oro plus sumažėjęs oro srautas plus kaimyniniai šilumos šaltiniai.
Apibūdinant impulsines, pjaustytas, dvikryptes ar regeneracines sroves, apskaičiuokite šildymą iš RMS srovės: P = IRMS²R.
Maksimalus srovės rodiklis gali atrodyti labai didelis matavimo diagramose, tačiau ilgalaikis šildymas daugiausia priklauso nuo RMS srovės (IRMS) per laiką.
Pakartojamas gedimo modelis pasirodo, kai patvirtinimas koncentruojasi į maksimalias ribas, o didelis darbo ciklas tyliai sukuria beveik nuolatinį šildymą.
Naudokite blogiausio atvejo varžos vertę, kai apskaičiuojate energijos viršutinę ribą. Pradėkite nuo tolerancijos, tada įtraukite varžos pokyčius, kuriuos lemia šuntinės TCR, kai jos kūno temperatūra pakyla.
Net kai energija yra žemiau nominacijos reitingo, savišildymas vis tiek gali iškraipyti matavimus per: (a) varžos drifterį, ir (b) termines gradientus, kurie patenka į jausmo maršrutus ir terminacijas.
Konservatyvi prielaida, kuri dažnai taupo laiką, yra ta, kad šuntinė kūnas veikia karščiau nei greta esantis plokštės jutiklis praneša, ypač kai šuntinė yra arti kitų šiltų komponentų.
Paverskite vatus į temperatūros padidėjimą ir medžiagos įtempimą
Energijos skaičius pats savaime yra tik dalinė istorija; tas pats išsklaidymas gali būti nuobodus plačiame vario plote ir problemiškas tankiame išdėstyme hermetiškame dėžutėje.
Praktinis klausimas tampa: kokia temperatūra pasiekia šuntinis elementas ir terminacijos aukšto aplinkos, silpno oro srauto ir greta esančių šilumos šaltinių metu, ir koks yra to rezultato pakartojamumas per vienetus?
Duomenų lapuose paprastai nurodoma nominali galia esant nuorodinei aplinkai (dažnai 70 °C), o tada sumažinama leidžiama galia virš tos ribos.
Patikrinkite, kur tikroji dėžutės „aplinka“ yra veikimo metu, nes dėžutės oras paprastai šokinėja gerokai virš kambario temperatūros ir gali drastiškai keistis priklausomai nuo vietos.
Artimi šilumos šaltiniai, kuriuos reikia apsvarstyti, apima: baterijas; induktorius; galios MOSFET'us; diodų lygintuvus; karštus reguliatorius.
Paviršiaus montavimo šuntai, PCB varis dažnai perneša didžiąją dalį šilumos. Temperatūros padidėjimas gali smarkiai svyruoti priklausomai nuo vario ploto, vario storio, plokštelių sujungimo ir terminių perėjimų tankio.
Vėlesni maršrutizavimo pakeitimai, kurie sumažina varį dėl patogumo, dažnai sukelia karštas vietas ir šlaitus, kuriems niekas nenorėjo išleisti laiko tvarkaraštyje.
Darbo srautas, kuris linkęs būti ramus prijungimo procesą, yra išsaugoti gausų varį ankstyvoje stadijoje ir atpalaiduoti tik po to, kai matavimai parodo, kad šiluminis elgesys išlieka gerai kontroliuojamas.
Veikimas žemiau nominalaus galingumo lygio išvengia tiesioginio pažeidimo, tačiau nežada stabilios jutiklų veikimo. Daugelis produktų pirmiausia pamažu degradacija: varža kyla, kalibracija keičiasi, o apsaugos slenksčiai klaidžioja.
Iš patikimumo perspektyvos, šunto pasirinkimas dažnai vyksta sklandžiau, kai jis yra apibrėžiamas aplink tikslumo išsaugojimą ir svyravimų elgseną, o galingumas traktuojamas kaip vienas iš įėjimų, o ne visas sprendimas. Toks apibrėžimas mažina nusivylimą dizainu, kuris praėjo greitą funkcionalumo testą, tačiau vėliau kovoja su drėkinimu, pakartojamumo tikrinimu arba lauko senėjimu.
Apibrėžkite rezervą su aiškiu temperatūros ir svyravimo tikslu
Dažnas taisyklės gairės yra 2× nuolatinės galios rezervas, tačiau labiau ginčytinas požiūris sieja rezervą su leistinu temperatūros pakilimu ir leistinu svyravimu.
Jei gyvenimo trukmės matavimo tikslumas yra dizaino tikslas, pasirinkite šuntą taip, kad stabilios būsenos temperatūros pakilimas liktų mažas maksimalios išlaikomos apkrovos atveju, o ne svyruotų netoli stačios derating kreivės dalies.
Šis pasirinkimas taip pat sumažina litavimo jungčių įtempimą nuo ciklinio įkaitimo, kuris yra viena iš tų problemų, kuri gali atrodyti gerai, kol staiga tampa vėlyvojo etapo derinimo šuliniu.
Dėl perkrovos ir trumpo įvykių, naudokite energiją ir šilumos ciklo mąstymą
Trumpi impulsai gali viršyti nuolatinį reitingą be akimirkos gedimo, tačiau vis tiek palieka nuolatinį varžos pasikeitimą.
Dėl variklio paleidimo, srovės impulsų ar baterijų gedimo srovių, vertinkite impulso stresą naudodami energiją: E = ∫ I²R dt.
Kai duomenų lapai pateikia impulso/perkrovos grafikus, naudokite juos su faktiniu impulso pločiu ir darbo ciklu. Kai grafikai trūksta arba yra neaiškūs, traktokite pakartotinius impulsus kaip šilumos ciklo scenarijų, o ne kaip vieno įvykio triuką.
Šuntas gali toleruoti vieną gedimo impulsą ir vis tiek senti po pakartotinės apkrovos. Pakartojimas dažniausiai pasireiškia kaip lėtas offset svyravimas, epizodiniai rodmenys dėl litavimo nuovargio arba subtilus kilpų spalvos pakitimai.
Pagreitinti ciklavimo testai, atliekami anksti, gali pašalinti daug neaiškumo vėliau, ir jie dažnai emocine prasme atsiperka, nes per sisteminę validaciją pasitaiko mažiau mįslių, kurios kartais tik nepavyksta.
Patvirtinkite su didelės apkrovos šiluminiais testais ir paprastais sveikatos patikrinimais
Apskaičiavimai siaurina kandidatų ratą, tada stalo patikrinimas atskleidžia, ką tiksliai daro apvalkalas, oro srautas ir išdėstymas. Veikite maksimaliai realiai apkrovai, kol temperatūros nusistovės, pakartokite ekstremaliomis temperatūromis, tada palyginkite prieš ir po testo varžą bei matavimo stabilumą po atvėsimo.
Sekite šiuos sveikatos rodiklius testavimo metu ir po jo:
• Offset svyravimas, kylantis per laiką esant fiksuotai srovei.
• Litavimo jungtys, kurios veikia pastebimai karščiau nei resistorius arba galiniai terminai.
• Plokštės patamsėjimas arba fluxo likučių tamsėjimas aplink kilpas.
• Epizodiniai rodmenys tam tikroje vietoje prispaudžiant, vibracijos arba šilumos ciklų metu.
Gedimo elgsena, kurios siekiama išvengti šiuo darbo procesu
Rizika didėja, kai šuntas artėja prie savo šiluminio lubų, o gedimo parašas paprastai patenka į keletą atpažįstamų segmentų:
• Varžos svyravimas, tiesiogiai konvertuojantis į matavimo klaidą.
• Litavimo nuovargis ir kilpų pažeidimai dėl šilumos ciklų, kurie sukelia epizodinius arba triukšmingus rodmenis.
• Perkaitimas, sukeliantis atviras/trumpas įvykius, panaikindamas apsaugos funkcijas arba sukeldamas antrinę žalą kitur.
Tvirta išsklaidymo apžvalga baigiasi parodytu rezervu temperatūros pakilimui ir svyravimo elgsenai, o ne sustojus ties galingumo apskaičiavimu.
Medžiagų pasirinkimas ir šunto kūrimo strategija
Šunto tikslumas paprastai remiasi dviem plačiomis temomis: kaip varža elgiasi, kai dalis įkaitinama, ir kaip gerai matavimo išdėstymas neleidžia parazitams pasprukti į rodmenį. Praktikoje naudinga traktuoti šuntą kaip daugiau nei resistoriaus simbolį schemoje; jis elgiasi kaip maža šilumos struktūra su mechaniniais sąsajomis ir vario geometrija, kuri gali tyliai nukreipti skaičius.
Dominuojantys klaidų šaltiniai: temperatūros pakilimas; jungties/kontakto varža; išdėstymo sukeltinė indukcija.
Kai dizaino komanda jaučiasi nustebinta drifting srovės atkūrimu, retai kada tai atsitinka, nes Omo dėsnis nustojo veikti. Dažniau taip atsitinka, nes šiluminė ir fizinė įgyvendinimas pridėjo elgesio, kurie buvo lengva atmesti schemos peržiūros metu, o po to sunku ignoruoti dirbtuvėse.
Medžiagos pasirinkimas
Praktinis pasirinkimo tikslas yra mažas temperatūros varžos koeficientas (TCR). Aliuminiai kaip manganinas ir konstantanas plačiai naudojami, nes jų varža keičiasi tik šiek tiek kylant temperatūrai. Toks elgesys atitinka realybę, kad šuntas skirtas dissipacijai, kartais nuolat, ir net kuklūs vatų gali pakelti temperatūrą pakankamai, kad pakeistų rodmenį.
Taip pat padeda planuoti „savarankiško šildymo“ režimą kaip normalų veikimo režimą, o ne išimtį. Jei lydinio TCR yra didesnis, pasipriešinimo pokyčiai vyksta nuosekliai apkrovai, o matuojama srovė gali atrodyti, kad šokinėja, net jei tikroji srovė yra stabili. Tokie lėti svyravimai gali būti ypač erzinantys patikrinimo metu, nes jie atrodo kaip prietaisų problemos, kol šilumos situacija tampa aiški.
Įprastos klaidingos diagnozės lėtai srovės svyravimams po apkrovos žingsnio: ADC triukšmas; stiprintuvo nuokrypis; kalibravimo klaida.
Tipiškoje laboratorinėje aplinkoje paprastai stebima, kaip rodoma srovė lėtai kyla dešimtis sekundžių po žingsnio pasikeitimo, tada nurimsta, kai šuntas ir jo varis galiausiai pasiekia šiluminį pusiausvyrą. Pirmą kartą stebint tokį elgesį gali pasirodyti, kad tai yra fantominė problema, tačiau ji dažnai išnyksta, kai temperatūros kilimas ir šilumos srautas laikomi pirmo lygio projektavimo apribojimais.
Šildymas neapsiriboja tik vidutiniu temperatūros kilimu; gradientai per šunto korpusą ir jo jungtis gali iškraipyti pakartojamumą. Kompaktiniuose plokštėse vienas šunto galas gali išskirti šilumą į didelį vario šaltinį arba gaudyti oro srautą, kol kitas galas lieka palyginti karštas. Tas nevienodas temperatūros pasiskirstymas gali sukelti subtilius pasipriešinimo pokyčius ir vietinius EMF bei kontaktinius elgesius, kuriuos jutiklių laidai bando ignoruoti.
Norint, kad rezultatai atrodytų mažiau jautrūs skirtingiems gamybos procesams, paprastai naudinga paskirstyti šilumą prognozuojamu būdu:
• Tinkamai užtikrinti pakankamą vario skerspjūvį srovės perdavimui ir šilumos sklaidai.
• Vengti montavimo detalių (standoff'ai, spaustuvai, korpuso briaunos), kurios vieną pusę atvėsina labiau nei kitą.
• Abu šunto galus išlaikyti simetriškai, kiek to leidžia mechaninis dizainas.
Net labai žemo TCR lydinys turi ribas. Jei veikimo taškas sukelia didelius temperatūros svyravimus, nes šuntas yra per mažas, oro srautas yra nenuspėjamas arba šilumos šalinimas yra silpnas, tam tikri svyravimai ir ilgas sėdimasis po apkrovos pokyčių yra tiesiog tai, ką sukelia fizika. Projektuojant, kad šuntas veiktų „mažiau karštai nei galėtų“, dažnai gaunamos ramios vertės ir mažiau galvos skausmą keliančių klaidų taisymų sesijų.
Konstrukcija
Geros lydinės pasirinkimas retai baigia darbą. Konstrukcijos ir tarpusavio jungčių detalės dažnai dominuoja, nes šunto signalas paprastai yra milivoltų lygyje, kur mažos parazitinės įtampos pradeda konkuruoti su matuojamu kiekiu.
Šiame milivoltų režime nedaug reikia, kad papildomas serijinis pasipriešinimas turėtų reikšmės: litavimo filė, vias, jungčių kontaktai ir vario susiaurėjimai visi gali pridėti nuostolių, kurie atrodo kaip tikra šunto įtampa, nebent jutikliai yra tinkamai išdėstyti. Tai viena iš tų sričių, kur inžinieriai gali pasitikėti žiūrėdami į schemą, o po montavimo jaustis mažiau patogiai, nes schema praleidžia fizinį srovės kelią, kurį sukuria PCB ir jungtys.
Keturių terminų (Kelvin) šuntas, arba bent jau pėdsakas, atskiriantis srovės ir jutiklių jungtis, paprastai suteikia patikimesnius rezultatus nei dviejų terminų suėmimas. Ketinimas yra paprastas: matuoti įtampą per patį resistyvų elementą, o ne per jungtis ir varį, naudojamą apkrovos srovei perkelti.
Didelės srovės atveju net miliohmo dalys serijiniame pasipriešinime gali sukelti milivoltų papildomą nuostolį. Kai tas papildomas nuostolis yra jutiklių kelyje, jis gali atsidurti tame pačiame intervale, kaip ir numatyta šunto signalas ir iškreipti nustatytą srovę. Daugelis dizainų, kurie atrodo teisingi ant popieriaus, galiausiai skaito aukštai arba svyruoja, nes fizinis įgyvendinimas atsitiktinai įtraukė paslėptą pasipriešinimą į jutiklių regioną.
Kelvin jutikliai atlieka tai, ką žada, tik tada, kai jutiklių pėdsakai jungiasi prie numatytų elektros ribų. Jutiklių pagalvėlės geriausiai veikia, kai jos tiesiogiai matuoja įtampą per resistyvų elementą, o ne kur nors palei didelės srovės varį, kuris taip pat neša apkrovos srovę ir jos susijusius IR nuostolius.
Išdėstymo įpročiai, kurie paprastai mažina nemalonius staigmenas:
• Šalia resistyvų elementų sukurti Kelvin jutiklių pėdsakus.
• Surengti jutiklių pėdsakus kaip glaudžius diferencinius poras.
• Laikyti jutiklių porą toliau nuo jungimo mazgų ir triukšmingų energijos kilpų.
• Tiesiai grąžinti jutiklių porą į stiprintuvų įėjimus, nesidalinant didelės srovės segmentais.
Jutiklių porą traktavimas kaip instrumentinį signalą, o ne tiesiog dar vieną tinklą, dažnai lemia stabilesnius matavimus per gamybos variacijas, pakartotinus darbus ir jungčių senėjimą. Tas stabilumas sunkiai vertinamas per vėlyvą klaidą, kai laiko spaudimas daro kiekvieną neaiškų milivoltą asmenišką.
Dinaminės apkrovos: Induktyvumas kaip tylus papildomas įtampos terminas
Su dinamine srove, induktyvumas dažnai tampa dominuojančia matavimo klaidos šaltiniu. Išmatuotas šuntų įtampa nėra grynai I × Rshunt. Kai srovė greitai keičiasi, induktyvinis terminas, Vinductive = L(di/dt), pridedamas arba atimamas iš rezistivinio kritimo. Greitai perjungiančioje maitinimo elektronikoje induktyvinis indėlis gali viršyti rezistivinio indėlio dalį perjungimo ribose, todėl momentiniai rodmenys gali atrodyti neteisingi net tada, kai matavimo grandinė veikia tiksliai taip, kaip buvo sukurta.
Vienas aspektas, kuris nustebina komandas: šuntų išdėstymas gali atrodyti tikslus DC ir tada atrodyti netikslus PWM aplinkoje. Daugeliu atvejų grandinė tiesiog atspindi srovės kelio fiziką, įskaitant jos parazitinį induktyvumą, o ne daro skaičiavimo klaidą.
Mažo induktyvumo šuntai sumažina kilpos plotą per plačius, plokščius srovės kelius ir simetrišką geometriją. Toks konstravimas sumažina parazitinį induktyvumą ir sumažina di/dt artefaktų dydį. Praktiniuose sprendimuose keletas geometrinių pasirinkimų nuolat juda link pakartojamumo:
• Simetriškas srovės įėjimas ir išėjimas aplink rezistinį elementą.
• Trumpi, tiesūs srovės keliai su minimaliais kilpos plotais.
• Plati laidininkų skerspjūviai, kurie išvengia siaurų susiaurėjimų netoli šunto.
Kai PWM kraštai yra greiti, šie fiziniai pasirinkimai dažnai daro daugiau matavimo stabilumui nei maži pakitimai nominalioje atsparumo vertėje, o tai gali atrodyti priešingai intuicijai, kol pirmą kartą išdėstymo pokytis išspręs tai, kas atrodė kaip analoginio priekio problema.
Kai (di/dt) yra aukštas, jutiklio stiprintuvo laikymas arti Kelvin taškų sumažina sužadintą įtaką ir išvengia jutiklio kilpos ploto padidinimo. Sandarus diferencialinis maršrutas padeda dėl tos pačios priežasties. Filtravimas tada tampa sąmoningu pasirinkimu, o ne požiūriu, nes perjungimo kraštai gali alisuoti į matavimo juostos plotį ir sukurti rodmenis, kurie atrodo triukšmingi, šokinėjantys ar klaidinantys.
Matavimo tikslų pasirinkimai (pasirinkite anksčiau, nes tai stumia išdėstymo ir analoginius sprendimus skirtingomis kryptimis): vidutinė srovė energijos stebėsenai, riboti juostos plotį, kad kraštai būtų signalizuojami ir ekranas nusistovėtų; pikinių/tranzito srovių apsaugai, išlaikyti juostos plotį didesnį, pabrėžiant mažą induktyvumą ir atsargų išdėstymą, kad sumažintų klaidingus suveikimus.
Kasdienio inžinerijos terminologijoje dizainas jaučiasi sklandesnis, kai komanda anksti nusprendžia, ar nori elektriškai greitos srovės informacijos, ar energijos tikslumo srovės informacijos. Šie du tikslai gali būti abu galiojantys, tačiau retai klesti po ta pačia šunto geometrija, stiprintuvo juostos plotiu ir filtravimo strategija.
Mechaninės ir saugos faktoriai

Mechaninis vykdymas lemia, ar teorinė našumas išlieka, kai produktas susiduria su šiluma, vibracija, tvarkymu ir laiku. Elektrinė tikslumas gali būti optimizuotas schemose ir skaičiuoklėse, tačiau tikrojo pasaulio stabilumą ir saugų elgesį dažnai lemia mechaninės ir šiluminės realijos, kurias kartais nesunku nuvertinti, kol prototipas nepradeda „veikti kitaip“ ant suolo.
Šilumos valdymas ir šiluma valdomos matavimo klaidos
Didelės srovės šuntai paverčia mažas įtampos kritimas į šilumą, o ši šiluma turi turėti pakartotinį kelią išplisti ir išeiti iš sistemos. Nekompetentinga šilumos kelias gali sukelti matavimo svyravimą ir drifą. Šie efektai dažnai tampa akivaizdžiausi per apkrovos pokyčius, tipo temperatūros pokyčius ir sistemos šildymo laikotarpius.
Šuntas gali atrodyti elektros prasme tvirtas izoliacijoje ir vis tiek drifti, kai jis yra įmontuotas į per mažą ar nepatogią vario struktūrą. Praktikoje aplinkinis varis tampa šunto šiluminės aplinkos dalimi ir srovės paskirstymo tinklo dalimi.
Dažniausiai netikėtai šilumą sukeliančių veiksnių paprastai yra kasdieniai, todėl jie praeina pro atsiliepimus: vienas susiaurintas sekcija, perėjimo mažinimas ar sluoksnio perėjimas, kuris koncentruoja srovės tankį.
Rekomenduojamos išdėstymo taktika:
• Plati, stora vario liejimo didelės srovės segmentams
• Trumpi, tiesūs srovės keliai su minimaliais siaurėjimais
• Kelios perėjimo angos tarp sluoksnių, kad paskirstyti tiek srovę, tiek šilumą
• Jutiklių surinkimo taškai, kurie yra išdėstyti taip, kad išvengtų parazitinės varžos didelės srovės vario atveju
Kai plokštės grįžta iš laboratorijos su mįslingu drifto, tai dažnai atsekama iki vienos nepastebėtos susiaurėjimo, kuris tampa tikru šilumos šaltiniu, nedidelis šunto temperatūros padidinimas pakankamai, kad iškreiptų rodmenis realios apkrovos metu.
Jei oro srautas yra atsitiktinis, o ne apibrėžtas, šunto temperatūra gali keistis su korpuso orientacija, ventiliatoriaus svyravimu arba kaip sandariai kabeliai yra tvarkomi netoli plokštės. Toks kintamumas gali būti erzinantis, nes jis sukuria kalibravimo elgesį, kuris jaučiasi nuotaikingas iš vieno išdėstymo į kitą, net kai niekas akivaizdžiai nepasikeitė elektros prasme.
Mažas šilumos išsklaidymo įrenginys, kontroliuojamo oro srauto kanalas arba tyčia sukurtos šilumos kontaktinės strategijos gali padaryti temperatūros profilį pakartotinai. Pakartotinumas dažniausiai yra vertingesnis nei stengtis pasiekti žemiausią galimą temperatūrą, nes kalibravimo ir kontrolės elgsena pasinaudoja nuoseklumu.
Situacijos, kai pikų temperatūra yra svarbesnė už vidutinę:
• Motorų vairavimas su PWM apkrovos dinamika
• Solenoido ar aktuatoriaus pulsuojanti veikla
• Įsijungimo įvykiai ir greiti srovių transientai
• Darbo ciklu pagrįstos pramoninės apkrovos
Projektavimas tik remiantis pastovių šilumos skaičiais gali sukelti pertraukiamą nuokrypį darbo ciklo perėjimų metu, kai kontrolės kilpos yra jautriausios ir kai „beveik teisingas“ jutiklis tampa operatyviai nepatogus.
Temperatūros gradientai per skirtingus metalus gali sukurti mikrovoltų lygio nuokrypius, o tie nuokrypiai nustoja būti akademiniai, kai nagrinėjamas signalas yra tik dešimtys milivoltų. Išdėstymo simetrija šiuo atveju nėra estetinė; tai yra matavimo metodas, kuris sumažina šiluminio EMF disbalansą.
Praktinės simetrijos įpročiai:
• Vesti jutiklių linijas kaip porą su panašiu ilgiu ir geometrija
• Išlaikyti vario masę ir šiluminę ekspoziciją panašias abiejuose jutiklių keliuose
• Vengti vienos jutiklinės laidų vietos arti vietinių šilumos šaltinių, tuo tarpu kitas laidas lieka vėsioje zonoje
Šilumos šaltiniai, kurie dažnai iškraipo vieną jutiklių poros pusę:
• MOSFET'ai
• Induktoriai
• Tiesiniai keitikliai ir diodai
• Didelės šilumos išskleidimo reguliatoriai
Modelis, kuris nuolat pasirodo derinimo metu, yra tas nuokrypis, kurį niekas negali paaiškinti dažnai koreliuoja su plokštės temperatūros pakilimais ir išnyksta, kai jutiklių išdėstymas ir šiluminė ekspozicija tampa subalansuotesni.
Tolerancija, stabilumas ir įtampos įtempimas
Pradinė tolerancija daro įtaką pradiniam taškui, tačiau ilgalaikė tikslumas dažniausiai formuojama pagal tai, kaip atsparumas kinta su temperatura, galios tankiu ir mechaniniais apribojimais, kurie subtiliai keičia šilumos profilį per mėnesius ar metus. Šuntai retai juda vieni; aplinkos struktūra ir proceso detalės dažnai nulemia rezultatą.
Taisyklinga tolerancija gali sumažinti pradinio pelno paskirstymą, tačiau sistemos pelnas vis tiek atspindi visą signalo grandinę. Dažnai matoma, kad gamybos variacijos labiau priklauso nuo nuolatinio nedidelio surinkimo skirtumų, o ne nuo nominalios šunto vertės.
Sistemos lygio veiksniai, prisidedantys prie pelno klaidos:
• Stiprintuvo įvesties nuokrypis ir šaltinio srovės
• ADC nuorodos nuokrypis ir temperatūros elgsena
• Atsparumas, pridėtas per jutiklių kelių išdėstymą ir jungtis
• Kontaktinis atsparumas jungtyse ar magistralės sąsajose
• Vario storio variacijos ir dengimo skirtumai
• Litavimo tūris ir fillet geometrija aplink jungtis
Pado dizainas ir jutiklių surinkimo vieta gali būti reguliuojami, kad sumažintų jautrumą litavimo filletams ir kontaktų geometrijai. Šis požiūris dažnai suteikia labiau nuspėjamą elgseną iš partijos į partiją, nei tiesiog nurodyti griežtesnę nominalią šunto toleranciją ir tikėtis, kad likusi dalis elgsis idealiai.
Mažas TCR riboja atsparumo judėjimą su temperatūra, o mažas galios koeficientas sumažina atsparumo judėjimą su taikomu galios tankiu. Neįprasta dalis yra ta, kad savaiminis šildymas yra apkrovos formos, o ne pastovus, taigi nuokrypis gali tapti priklausomas nuo apkrovos, praktiškai tampa tylia nelinijine, kurios kontrolės algoritmai gali neatsižvelgti.
Sąlygos, kurios dažnai atskleidžia apkrovai priklausomą nuokrypį:
• Plati dinaminė intervalų operacija
• Pasikartojančios pulsuojančios apkrovos
• Uždarojo ciklo kontrolė, kuri remiasi linijiniu srovės grįžtamuoju ryšiu
Patvari strategija yra laikyti šuntą kaip šilumos aktyvų ir sumažinti temperatūros kilimą už amperą naudojant vario sklaidą, numatomą oro srautą ir disciplinuotą komponentų išdėstymą, o ne remtis tik duomenų lapo patobulinimu, kuris gali neperkelti, kai plokštės lygio šilumos kontekstas dominuoja.
Net jei šunto kritimas yra mažas, elementas ir jo terminiai gali būti aukšto bendrojo potenciolo. Tai reiškia, kad dirbančios įtampos ribos, izoliacijos sistemos elgsenos ir plokštės lygio kraigo / atstumo turi būti įvertintos sisteminiu lygiu, o ne išvados remiantis milivoltų matavimu.
Dizaino patikrinimai, kuriuos reikia atlikti:
• Maksimali darbinė įtampa per elementą ir pakuotės izoliacijos sistemą
• Kraigo ir atstumo atitinkamai standartui ir užteršimo laipsniui
• Plokštės švarumas ir likučiai, kurie gali sumažinti efektyvų kraigą
• Fizinis išdėstymas, susijęs su užterštumo šaltiniais ir laidžiais atliekomis
Užteršimo veiksniai, kurie dažnai nustebina komandas vėliau:
• Dulkių kaupimasis oro srauto keliuose
• Kondensacija saugojimo ar transportavimo metu
• Flux likučiai ir netolygus valymo padengimas
Kai nuotėkio gedimai pasirodo atsitiktiniai lauke, pagrindinė priežastis dažnai būna prognozuojama kombinacija tarp vietos, likučių ir aplinkos, kuri tampa akivaizdi tik susijungus grąžinimams su gamybos proceso detalėmis.
Patvarumas po tikrųjų mechaninių apkrovų
Šuntai dažnai naudojami ten, kur susiduria šiluma, vibracija ir pakartotiniai energijos ciklai. Protinga manyti, kad surinkimas patirs lenkimą, smūgius ir šiluminės plėtimosi neatitikimus, net jei produktas reklamuojamas kaip stacionarus, nes gabenimas, montavimas ir aptarnavimas vis tiek sukelia mechaninius įvykius.
Galinės apdailos ir apsauginių dangų kokybė turi atitikti numatomą atmosferą. Korozija ne visada sukelia dramatiškus gedimus; ji gali tyliai įvesti milijono omao lygio pokyčius, kurie laikui bėgant priverčia kalibraciją pasikeisti, kas gali būti itin nemalonu, nes programinė įranga filtruojanti gali padaryti nuokrypį mažiau akivaizdžiu, tačiau neišvengia klaidos.
Aplinkos, kurios pagreitina korozijos mechanizmus:
• Pramoninės dūmai ir cheminis poveikis
• Kelių druska ir pakrantės druskos oras
• Didelė drėgmė ir dažni kondensacijos ciklai
Dideli šuntai gali elgtis kaip standūs, laikantys ankeriai. Terminių ciklų metu ta standumas gali apkrauti litavimo jungtis, ypač šalia plokštės kraštų, varžtų taškų ar sričių, kurios lenkiasi surenkant. Gedimai dažnai pasirodo ten, kur masė ir vibracija sutampa, o ne būtinai ten, kur dabartinė tankis yra didžiausias.
Mechaninio patikimumo priemonės:
• Pridėti mechaninę atramą, kur tai atitinka montavimo koncepciją
• Laikyti rekomenduojamo lauko modelio, kad būtų kontroliuojama drėgmės zona ir filto forma
• Vengti peržengti PCB sritis, kurios lenkiasi montavimo ar įtempimo metu
• Laikyti didelės masės dalis toliau nuo žinomų lankstymo taškų, kai yra išdėstymo laisvė
Lauko grąžinimai dažnai patvirtina paprastą realybę: įtrūkimai paprastai formuojasi ten, kur koncentruoja stresą, ir stresas koncentruojasi, kai standumas staiga keičiasi.
Varganose aplinkose komponentų pasirinkimas gauna naudos iš ciklinių ir vibracijos našumo duomenų, kurie atspindi realius kvalifikacijos metodus. Sumažinimai, tokie kaip fiksavimas ar užpildymas, gali padėti kai kuriuose montavimo, tačiau jie taip pat gali sukelti naujų šilumos ar streso problemų, jei bus taikomi nepatvirtinus šalutinio poveikio.
Požiūriai, kurie dažnai vertinami kartu:
• Komponentai su patvirtintais šilumos ciklais ir vibracijos duomenimis
• Užpildymas ar fiksavimas patvirtinus, kad šiluma nėra uždaryta
• Mechaniniai apribojimai, kurie neleidžia kurti naujų streso taškų
Testavimo planavimo detalės, mažinančios netikėtą pasitikėjimą:
• Temperatūros ciklai su apgaltu apkrovimu, o ne tik be energijos ciklai
• Nuokrypio matavimas per darbo ciklo perėjimus
• Litavimo deformacijų ir mikroįtrūkimų tikrinimas po ciklų
Be energijos šilumos testai gali atrodyti švarūs, tačiau praleidžia energijos koeficiento susijusius nuokrypius ir apkrovą formuojančius mechaninius poveikius, kurie pasirodo tik tada, kai tikrai teka srovė.
Saugumas, atitiktis ir avarinis elgesys
Saugumas formuojasi pagal tai, ką sistema daro, kai kažkas blogai, o ne tik pagal komponento spausdintą reitingą. Srovės jutiklių grandinė, kuri elgiasi prognozuojamai klaidos sąlygose, dažniausiai sukuria ramesnius rezultatus lauke ir aiškesnę diagnostiką aptarnavimo metu.
Dalių, turinčių pripažintas saugos sertifikatus, gali sumažinti atitikties nežinomumą ir paprastai pagerinti atsekamumą. Tačiau sertifikavimas nėra trumpas kelias aplink sistemų patikrinimą, nes debesys, atstumai ir šilumos sąlygos yra surinkto produkto ir jo išdėstymo parinkčių savybės.
Atitikties ir patikrinimo punktai, kurie lieka sistemos nuosavybėmis:
• Plokštės lygio debesys ir atstumai
• Šilumos pakilimas tikroje dėžutėje ir oro srauto sąlygoje
• Atstumai aplink teršalus ir liekanas
• Gamybos kontrolės, kurios išlaiko laikomą švarumą ir atstumus
Manykite, kad šuntas gali sugesti atviras, pakilti arba sukelti pertraukų jungtis. Kontrolės kilpoje atviras šuntas gali būti klaidingai suprastas kaip jokios srovės, kas gali sukelti sistemą reikalauti daugiau galios ir sukurti neatskiriamą elgesį.
Gedimų elgsenos, dėl kurių verta planuoti:
• Atviras grandinės šuntas arba pakeltas pabaiga
• Laipsniška pasipriešinimo drifts, kuriame yra srovės rodmenų šališkumas
• Pertrūkiai kontaktas po vibracijos ar šiluminės plėtimosi
• Sensing lead pažeidimai arba ADC įėjimo anomalijos
Aptikimo ir mažinimo modeliai, kurie dažnai naudojami:
• Įmanomumo tikrinimai, palyginant komandą ir matuojamą atsaką
• ADC prisotinimo stebėjimas ir intervalo sveikatos tikrinimai
• Laiko apribojimo remiantis gedimų fiksavimui nestabiliais rodmenimis
• Apibrėžtas išjungimo elgesys, kai sensing tampa nepatikimas
Sistemos, kurios pereina į prognozuojamą de-energizuotą būseną po sensing gedimų, paprastai yra lengviau patvirtinti ir lengviau pasitikėti nei sistemos, kurios bando tęsti veikimą neaiškaus grįžtamojo ryšio.
Pateikite testinius taškus arba integruotą diagnostiką, kad gedimus būtų galima izoliuoti nesikreipiant į rizikingus aukštos srovės ar aukštos įtampos mazgus. Aptarnavimo komandos paprastai juda greičiau, kai dizainas siūlo aiškų metodą patvirtinti, ar jutiklių grandinė yra vientisa, o toks greitis dažnai sumažina antrinę žalą dėl pakartotinių bandymų ir klaidų.
Paslaugoms palankios dizaino nuostatos:
• Prieinami testiniai taškai jutiklių įtampos ir referencinių patikrinimų
• Integruoti savitestavimo mazgai arba kalibravimo atsiliepimai, kur įmanoma
• Aiškios izoliavimo veiklos, atskiriančios jutiklių gedimus nuo apkrovos gedimų
• Dokumentacija, jungiantis matuojamus mazgus su tikimais saugiais vertėmis
Mechaniniai ir saugos veiksniai yra praktiškas kelias, kuriuo tikslumas, stabilumas ir saugus elgesys išlieka laikui bėgant. Patikimesnių srovės jutiklių dizainai pirmiausia traktuoja šuntą kaip termodinaminį elementą, o tik antra kaip idealią rezistorių, tada derina išdėstymo simetriją, izoliacijos discipliną, užteršimo kontrolę ir saugumo logiką aplink tą realią veikimo kontekstą.
Skaičiavimo pavyzdžiai
Šuntiniu srovės jutimu popieriuje atrodo švariai, o lygtys retai sukelia problemų pačios. Tai, kas dažnai nustebina žmones vėliau, yra tai, kaip greitai teisinga elektrinė vertė gali atrodyti kitaip, kai temperatūra kyla, tvirtinimo įtampa, vario atsparumas ir jungtukų elgesys įsijungia į paveikslą. Kasdieniniame projektavimo darbe dažniausiai patenkinamiausias šunto pasirinkimas yra tas, kuris išlieka nuspėjamas dėl šilumos, surinkimo variacijų ir vielos parazitų, vis dar gamindamas signalą, kurį analoginis priekinis galas gali perskaityti be dramos.
Tarkime, kad maksimalus srovės lygis yra 100 mA, o tikslinė jutiklių įtampa – 50 mV. Šis įtampos lygis paprastai yra patogus, nes jis yra virš bendrų nuokrypių ir triukšmo lygių, todėl sistema nėra priversta ieškoti rezoliucijos.
Elektrinė konfigūracija ir skaičiavimai:
• Atsparumas: R = 0.05 / 0.1 = 0.5 Ω
• Maksimalus šunto šilumos išskyrimas: P = I² × R = 0.1² × 0.5 = 0.005 W
5 mW atrodo beveik per mažas, kad būtų verta juo rūpintis, tačiau sunku ignoruoti, kaip dažnai tikra aparatinė įranga pasidaro šiltesnė, nei anksčiau buvo manoma naudojant ankstyvą skaičiuoklę. Pasirenkant didesnį galingumo reitingą (pavyzdžiui, 0.25 W), dažnai atrodo konservatyviai teisinga: tai sumažina temperatūros kilimą, sumažina atsparumo sujudimą ir suteikia erdvės, kai sistema nesielgia idealiai.
Situacijos, kurios dažnai išplečia nekenksmingos energijos prielaidą: karšti apvalkalai, šalia esantys šilumos šaltiniai, sumažinta konvekcija, ilgalaikė gedimų srovė dėl programinės įrangos ar apkrovos problemų.
Šiuo srovės lygiu savišildymas paprastai nėra dominuojantis klaidų terminas, o ši realybė gali būti keistai raminanti: šuntas gali būti geras, o priekinis galas tyliai nustato tikslumo lubas.
50 mV maksimalus signalas paprastai lengvai stiprinti, tačiau projektavimo pasitikėjimas gerėja, kai stiprintuvo įėjimo offsetas ir nuokrypis lieka gerokai žemiau milivoltų ribos per temperatūros pokyčius. Taip pat padeda, kai po stiprinimo išvesties triukšmas nenukreipia mažiausių žingsnių, dėl kurių jums reikia rūpintis. Dažna frustracija per peržiūros sesijas yra matyti atidžiai išrinktą šuntą, poruotą su stiprintuvu, kurio nuokrypio sujudimas per temperatūrą pasirodo esantis didžiausias klaidų biudžeto indėlis.
Net esant mažai srovei, žemės klaidos gali sukurti klaidas, kurios yra gėdinga didesnės nei šunto kritimas, kurį ketinote išmatuoti. Tinkamas, sujungtas jutiklių linijų ir švarios referencinės strategijos maršrutas padeda vengti nuokrypių, kurie pasirodo tik tada, kai kitos subsistemos keičia būsenas.
Įprastos išdėstymo praktikos, kurios mažina paslėptus rodmenis: Kelvino jutiklių maršrutas į šunto elementą, griežtas diferencialinis maršrutas, kontroliuojamos grįžtamieji keliai, atskyrimas nuo aukštų di/dt kilpų.
Tarkime, 50 A maksimalus ir 75 mV tikslinė jutiklių įtampa. Čia ketinimas yra gerai žinomas: palaikyti energijos nuostolius protingus, tuo pačiu pateikiant jutiklių signalą, kuris atlaiko triukšmingą aplinką.
Elektrinė konfigūracija ir skaičiavimai:
• Atsparumas: R = 0.075 / 50 = 0.0015 Ω
• Maksimalus šunto šilumos išskyrimas: P = 50² × 0.0015 = 3.75 W
5 W reitingas gali būti protingas pradinis filtras, tačiau etiketėje retai būna išsami informacija. Tikruose įrenginiuose temperatūros kilimas labai priklauso nuo to, kaip šuntas yra tvirtinamas ir aušinamas, o šie aspektai gali dominuoti galutiniame rezultate, net kai elektros matematika yra nepriekaištinga.
Praktiniai veiksniai, kurie dažnai nusveria katalogo numerį: vario plotas ir storis, oro srautas, montavimo sąsaja, artumas prie karštų komponentų, apvalkalo šilumos įsiurbimas.
Esant 50 A, įtampa iš jungtukų krenta ir varis gali pasiekti tokį pat lygį kaip 75 mV, tai yra tiksliai ta vieta, kur prasideda matavimo argumentai. Jei jutikliai nėra tiesiogiai paimti iš šuntavimo elemento (Kelvin jungtys), matavimai įtrauks laidų ir kontakto varžą, kuri gali svyruoti kartu su jungtukų senėjimu, oksidacija ir temperatūra. Tai dažna priežastis, kodėl dvi vienodai atrodančios vienetai stende po montavimo gali nesutapti.
Savęs šildymas keičia varžą pagal šunto TCR, o tas pokytis pasireiškia kaip pelno klaida. Dizainas dažniausiai atrodo labiau kontroliuojamas, kai šilumos elgesys yra laikomas kaip dalis matavimo perdavimo funkcijos, o ne kaip požiūris į paskutinį dalyką.
Daiktai, kurie dažnai įtraukiami į realistinį šilumos/klaidos patikrinimą: blogiausias atvejis nuolatinė srovė, realistiškas gedimo trukmė, karšta aplinka, dėžutės temperatūros kilimas, PCB vario platinimo varža, jungtukų šiluma.
Aukštos srovės trumpalaikiai veiksmiai gali atidengti induktyvumą ir mechaninę nestabilumą būdais, kurių sunku vidutinti programinės įrangos. Mažo induktyvumo elementų stilius (dažnai metalinių elementų konstrukcijos) sumažina matavimo artefaktus greitų srovės pokyčių metu. Mechaninis stresas taip pat nusipelno pagarbos: varžto sukimo momentas, PCB lenkimas ir šilumos ciklacija gali pakeisti varžą nedideliais kiekiais, kurie tampa matomi miliohmų lygyje.
Mechaniniai/struktūriniai veiksniai, kuriuos inžinieriai dažnai seka: sukimo momento svyravimai, poveržlių gumulavimas, laipsniškas pokytis laikui bėgant, šilumos išsiplėtimo nesutapimas, vibracija.
Tarkime, kad baterijų sistema turi 10 A viso masto ir 100 mV tikslinę jutiklio įtampą. Apskaičiavimai yra paprasti, tačiau lauko elgesys dažnai nėra, ypač kai krovimas ir nuleidimas vyksta šiltose vietose.
Elektrinė konfigūracija ir skaičiavimas:
• Varža: R = 0.1 / 10 = 0.01 Ω
• Visas šunto išsiskyrimas: P = 10² × 0.01 = 1 W
2 W (arba didesnės) dalys dažnai sumažina temperatūros kilimą ir pagerina stabilumą, kas atitinka tai, ką daugelis komandų supranta po pirmo lauko duomenų rato: dreifas dažnai pasireiškia, kai savęs šildymas ir dėžutės temperatūra sumuojasi. Kambario temperatūros laboratoriniai rezultatai gali būti iš tiesų puikūs ir vis tiek nepavykti numatyti elgesio padidėjusiame aplinkoje.
Sąlygos, kurios dažnai atskleidžia dreifą: nuolatinis krovimas/nuleidimas, karštos aplinkos, ribotas oro srautas, gretimi maitinimo keitikliai šildantys plokštelę.
Didelė jutiklio įtampa pagerina signalų ir triukšmo santykį ir sumažina stiprintuvo reikalavimus, tačiau padidina energijos nuostolius ir vietinį šildymą. Mažesnė jutiklio įtampa sumažina išskyrimą, tačiau daro didesnę naštą stiprintuvo offset, triukšmui ir išdėstymo įgyvendinimui. Daugelis tvirtų dizainų pasirenka vidutinę jutiklio įtampą ir tada skiria realią pastangą šilumos valdymui, nes ilgalaikis elgesys dažnai yra prognozuojamesnis nei siekiant minimalių nuostolių.
Prekybos ašys, kurios paprastai vertinamos kartu: SNR marža, stiprintuvo offset/dreifas galimybė, leistinas išskyrimas, temperatūros kilimas, mechaninio pakavimo apribojimai.
Šunto pasirinkimas įprastai vyksta sklandžiai, kai elektriniai tikslai ir fizinės realybės yra traktuojamos kaip viena susijusi problema. Ši seka yra pakankamai paprasta, kad ją būtų galima pakartoti, tačiau pakankamai detali, kad užfiksuotų problemas, kurios dažnai iškyla vėliau.
Pirmiausia apskaičiuoti elektrinius tikslus:
• Apskaičiuoti šunto varžą pagal pageidaujamą jutiklio įtampą: R = Vsense / IFS
• Apskaičiuoti nuostolius naudojant blogiausią atvejį srovę: P = IMAX² × R
Apibrėžiant IMAX, naudinga įtraukti trumpalaikius ir gedimo atvejus, kurie gali trukti ilgiau, nei pirmas įspūdis rodo.
Dalių, turinčių mažą TCR, mažą induktyvumą ir gerai aprašytą dreifo elgesį, savybės paprastai prisideda prie ramesnių derinimo ciklų. Konstrukcija, kuri palaiko Kelvin jutiklį, stabilias jungtis ir pakartojamą montavimą, dažnai pasiteisina vieneto konsistencijai.
Dalių savybės dažnai grupuojamos kartu renkantis: TCR, ilgalaikio dreifo specifikacija, impulsų valdymo pastabos, induktyvumas, jungties stilius, rekomenduojamas žemės raštas, Kelvin galimybė.
Išmatuokite arba modeliuokite šunto temperatūros kilimą realiame surinkime karštoje aplinkoje, naudodami numatytą montavimo metodą ir vario geometriją. Šis žingsnis dažnai išaiškina veiksnius, kurių inžinieriai norėtų, kad būtų mažesni: oro srauto prielaidos, šilumos sugėrimas, jungčių šildymas ir vario platinimo varža.
Nuolatinis dizaino požiūris yra tas, kad šunto jutiklis yra elektrinis matavimas, esantis šilumos ir mechaninėje sistemoje. Dizainai, kurie pripažįsta šį ryšį, dažnai teikia matavimus, kurie išlieka nuoseklūs tarp vienetų, temperatūros ir laiko.
Išvada
Tiksliam dabartiniam matavimui reikalinga daugiau nei pasirinkti rezistorių, kuris atitinka paprastą skaičiavimą. Srovės šuntų vertė, galios nuostoliai, temperatūros padidėjimas, tolerancija, TCR, stiprintuvo veikimas, ADC elgsena ir PCB išdėstymas visi prisideda prie galutinio rezultato. Subalansavus signalų stiprumą, efektyvumą, šiluminius limitus ir klaidų šaltinius, dizaineriai gali sukurti srovės jutiklių sistemas, kurios išliktų stabilios, tikslios ir patikimos tikruose veikimo sąlygose.
Dažnai užduodami klausimai [FAQ]
1. Kodėl pasirinkus itin žemą šuntų įtampą dažnai kyla daugiau matavimo iššūkių nei tikėtasi?
Labai žema šuntų įtampa sumažina galios nuostolius ir pagerina efektyvumą, tačiau taip pat daro matavimą pažeidžiamą stiprintuvo ofsetui, temperatūros driftnui, ADC kvantizacijos triukšmui, termoelektrinėms įtampoms ir perjungimo trikdžiams. Kai signalas tampa mažesnis, šie klaidų šaltiniai sunaudoja didesnę matavimo intervalo dalį. Tai, kas atrodo efektyvu popieriuje, gali galiausiai reikalauti papildomo kalibravimo, filtravimo ir išdėstymo optimizavimo, kad būtų išlaikyti stabilūs srovės matavimai esant temperatūros ir veikimo sąlygoms.
2. Kodėl šuntų rezistoriaus pasirinkimas iš esmės yra kompromisas tarp efektyvumo ir matavimo pasitikėjimo?
Padidinus šuntų rezistenciją, gaunama didesnė jutiklinė įtampa, kuri taiso signalo ir triukšmo santykį ir sumažina spaudimą stiprintuvui ir ADC. Tačiau tai taip pat didina galios nuostolius, temperatūros padidėjimą ir įtampos nuostolius, kurie pastebimi apkrovai. Sumažinus šuntų rezistenciją, pagerėja efektyvumas ir sumažėja šildymas, tačiau keliami griežtesni reikalavimai analoginei tikslumui, PCB išdėstymo kokybei ir skaitmeniniam filtravimui. Sėkmingi dizainai paprastai subalansuoja abu tikslus, o ne optimizuoja vieną.
3. Kodėl srovės jutiklių grandinė gali atrodyti tiksli kambario temperatūroje, bet po šildymo pastebimai drifti?
Savęs šildymas keičia šuntų rezistenciją pagal jo temperatūros koeficientą (TCR). Kai nuolatos teka srovė, šuntų ir aplinkinis varis palaipsniui įšyla, sukeldamas matuojamos vertės poslinkį, net jei faktinė srovė lieka nepakitusi. Papildoma šiluma iš šalia esančių komponentų, korpuso temperatūros padidėjimas ir oro srautų svyravimai gali dar labiau sustiprinti šį efektą. Šiluminė elgsena dažnai tampa pagrindiniu ilgalaikio matavimo tikslumo veiksniu.
4. Kodėl Kelvin matavimas laikomas būtinu žemos rezistencijos šuntų matavimams?
Kai šuntų vertės krinta iki miliomų diapazono, PCB takelių, perėjimų, litavimo jungčių ir jungčių rezistencija gali tapti panaši į patį šuntą. Kelvin matavimas atskiria srovę nešančią kelią nuo įtampos matavimo kelio, užtikrindamas, kad būtų matuojama tik įtampa per rezistencinį elementą. Be Kelvin jungčių, parazitinė rezistencija gali sukelti srovės priklausomas klaidas, kurių variacijos skiriasi tarp surinkimų ir laikui bėgant blogėja dėl jungčių senėjimo ar mechaninio įtempimo.
5. Kodėl galios nuostolių skaičiavimai turėtų būti pagrįsti RMS srove, o ne pikine srove daugelyje taikymo sferų?
Pikinių srovių vertės gali atrodyti grėsmingos per perjungimo įvykius ar paleidimo transitus, tačiau ilgalaikis šildymas pirmiausia priklauso nuo RMS srovės. RMS srovė atspindi vidutinę energiją, tiekiamą rezistoriui per laiką, ir todėl tiesiogiai veikia temperatūros padidėjimą. Dizainai, kurie koncentruojasi tik į pikines sroves, gali nepakankamai įvertinti šiluminį stresą, kai aukšto užimtumo ciklo apkrovos sukuria beveik nuolatines šildymo sąlygas.
Susijęs tinklaraštis
-
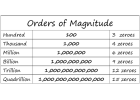
Kiek nulių per milijoną, milijardus, trilijonus?
![Kiek nulių per milijoną, milijardus, trilijonus?]()
2024/07/29
Milijonas reiškia 106, lengvai sugriebtas skaičius, palyginti su kasdieniais daiktais ar metiniais atlyginimais. Milijardas, lygi 109, pradeda tempt... -
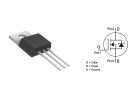
„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“
![„IRLZ44N MOSFET“ duomenų lapas, grandinė, lygiavertis, „Pinout“]()
2024/08/28
„IRLZ44N“ yra plačiai naudojamas N-kanalo galios MOSFET.Garsusi dėl puikių perjungimo galimybių, jis labai tinka daugybei programų, ypač galio... -
Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?
![Baterijos temperatūra per žema, įkrovimas sustojo.Kaip tai ištaisyti?]()
2024/10/6
Mobiliojo telefono akumuliatoriaus įkrovimo problemos yra įprastos, tačiau juos galima efektyviai valdyti.Temperatūra vaidina didelę įtaką akum... -
BC547 TRANSISTORAS KLAUSIMAS VADOVAS
![BC547 TRANSISTORAS KLAUSIMAS VADOVAS]()
2024/07/4
BC547 tranzistorius dažniausiai naudojamas įvairiose elektroninėse programose, pradedant nuo pagrindinių signalo stiprintuvų iki sudėtingų osci... -
Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)
![Išsamus SCR vadovas (Silicio kontroliuojamas lygintuvas)]()
2024/04/22
Silicio valdomi lygintuvai (SCR) arba tiristoriai vaidina pagrindinį vaidmenį „Power Electronics“ technologijoje dėl jų našumo ir patikimumo.Š... -
Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose
![Išsamus multiplekserių vadovas ir jų vaidmuo skaitmeninėse sistemose]()
2025/09/20
Multiplekseriai yra komponentai skaitmeninėse sistemose, skirtos nukreipti kelis įvesties signalus į vieną išvesties liniją, naudojant dvejetain... -
LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai
![LR621, SR621SW, 364, AG1 akumuliatorių ekvivalentai ir pakaitalai]()
2024/07/15
LR621 ir SR621SW mygtukų baterijos yra paplitusios kompaktiškuose elektroniniuose įrenginiuose, tokiuose kaip laikrodžiai, maži žaislai, skaiči... -
OP-AMP grandinių pagrindai
![OP-AMP grandinių pagrindai]()
2023/12/28
Sudėtingame elektronikos pasaulyje kelionė į jos paslaptis visada veda mus į grandinės komponentų kaleidoskopą, tiek išskirtinį, tiek sudėti... -
Palyginus NMO ir PMOS skirtumus ir programas
![Palyginus NMO ir PMOS skirtumus ir programas]()
2024/11/15
Suprantant efektyvias grandines, svarbu suprasti NMOS ir PMOS tranzistorių skirtumus.NMOS (N-type Metal-Oxide-Semiconductor) and PMOS (P-type Metal-O... -
CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti
![CR2450 vs CR2032 palyginimas: viskas, ką jums reikia žinoti]()
2025/09/15
Mygtukų baterijos, tokios kaip CR2450 ir CR2032, maitina daugybę kasdienių elektronikų, pradedant laikrodžiais ir nuotoliniais nuotoliniais mokes...




Karštos dalys
- AR2417-AL1A
- FS055C102K4Z2A
- R8A20220ABG
- SC75823E
- TAJY337K004RNJ
- PIC18F25K40T-I/SS
- NT68168BFG
- AT42QT1012-TSHR
- UPD78F0485GK-GAK
- DC6688FL32
- 06035U2R4BAT2A
- CY14B101L-SP35XC
- ADM3101EACPZ-250R7
- GRM1555C1H8R9BZ01D
- C1608X8R1C474M080AE
- VC0858SUNC
- CC1206FRNPO9BN332
- TC74VHC157FT-EL
- MCP1703AT-5002E/DB
- M68AS128DL70N6E
- MT47H64M8CF-25E:G
- TZ500N14KOF
- GRM1555C1E180GA01D
- GRM033R71H221MA12D
- NCP1117STAT3G
- 29SL800TE-90
- AD8279ARZ
- CC1206KKX7R5BB106
- LTC1700EMS#TRPBF
- 0805YG684ZAT2A
- GRM1885C2A6R7CA01D
- M5M27C102JK-15
- OPA4342U
- CGJ2B2C0G1H120J050BA
- 2MBI150-060
- VT1324SF
- SI2309DS-T1-E3
- T491B155M025AT7280
- T491A155K010ZT
- VI-212-CY
- BCM82328B1KFSBG
- K9F1208UOA-YCBO
- LTC3711EGN
- SSM3515BCBZ-RL
- VTSR2001103GUF
- HD74HC273FPVEL
- RTD2792-CG
- XC9536XL-15PCG44C
- FM69D1G56A-6BHGE
- DM3426.1